Nexus Autonomous Robotic Palletizer
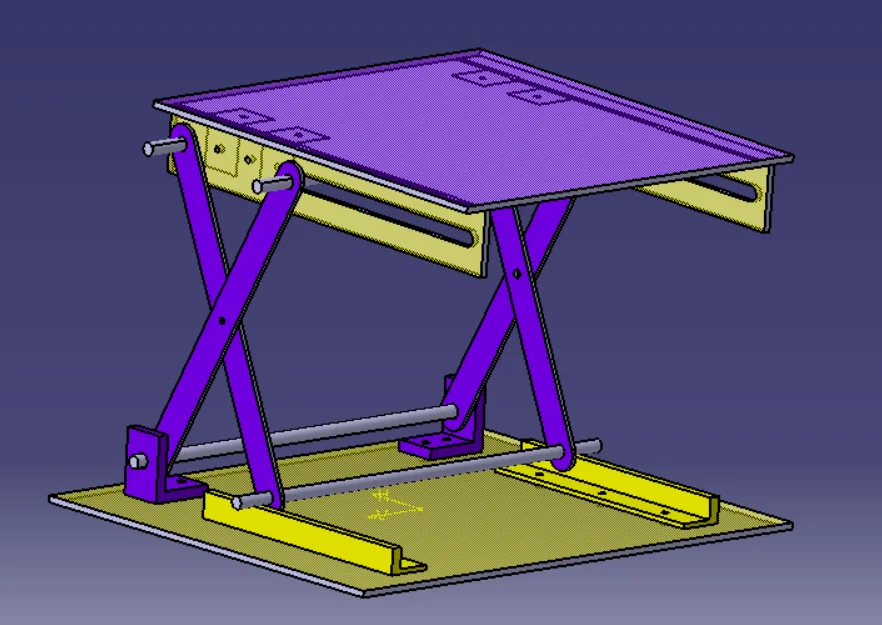
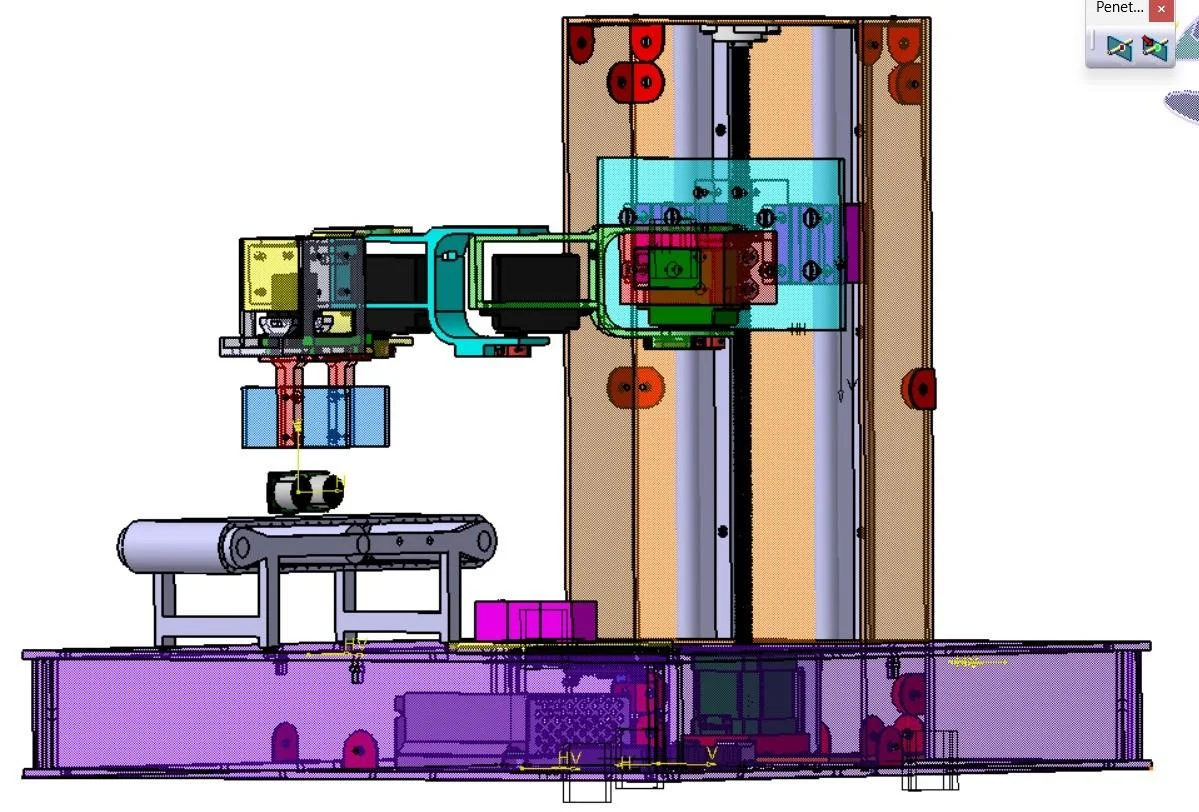
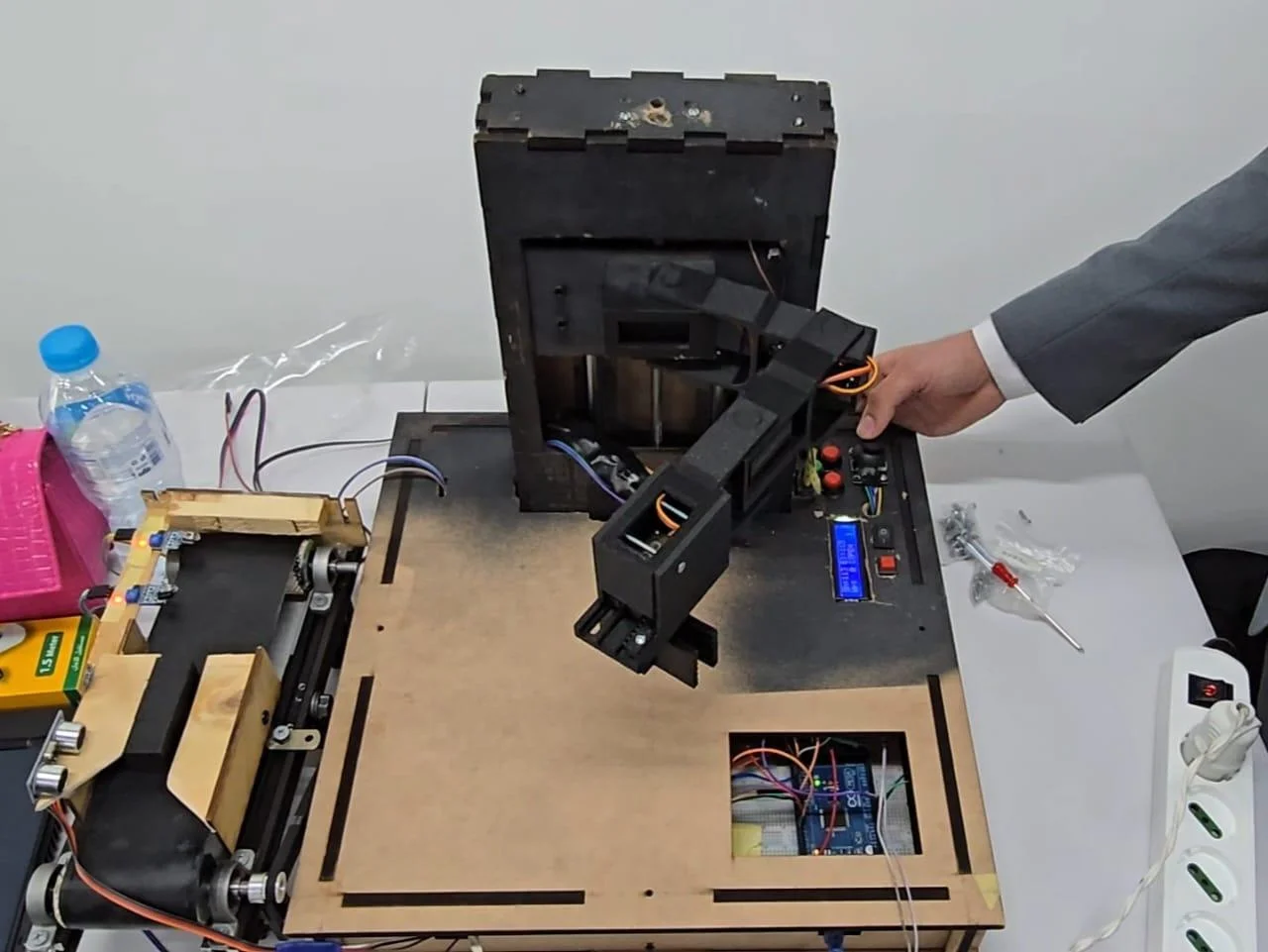
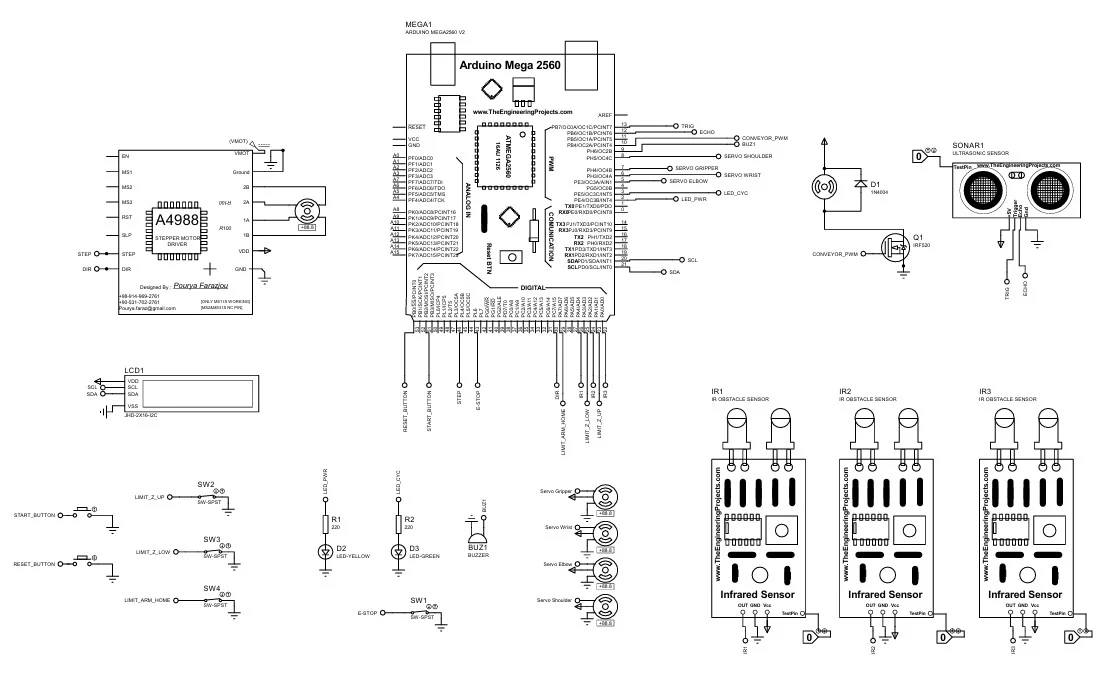
Developed and prototyped a fully autonomous 4-DOF tabletop robotic palletizer (PRRR SCARA configuration) capable of automatically picking products from an infeed location and stacking them onto a pallet in a predefined pattern. Entirely without manual intervention, the system detects incoming…
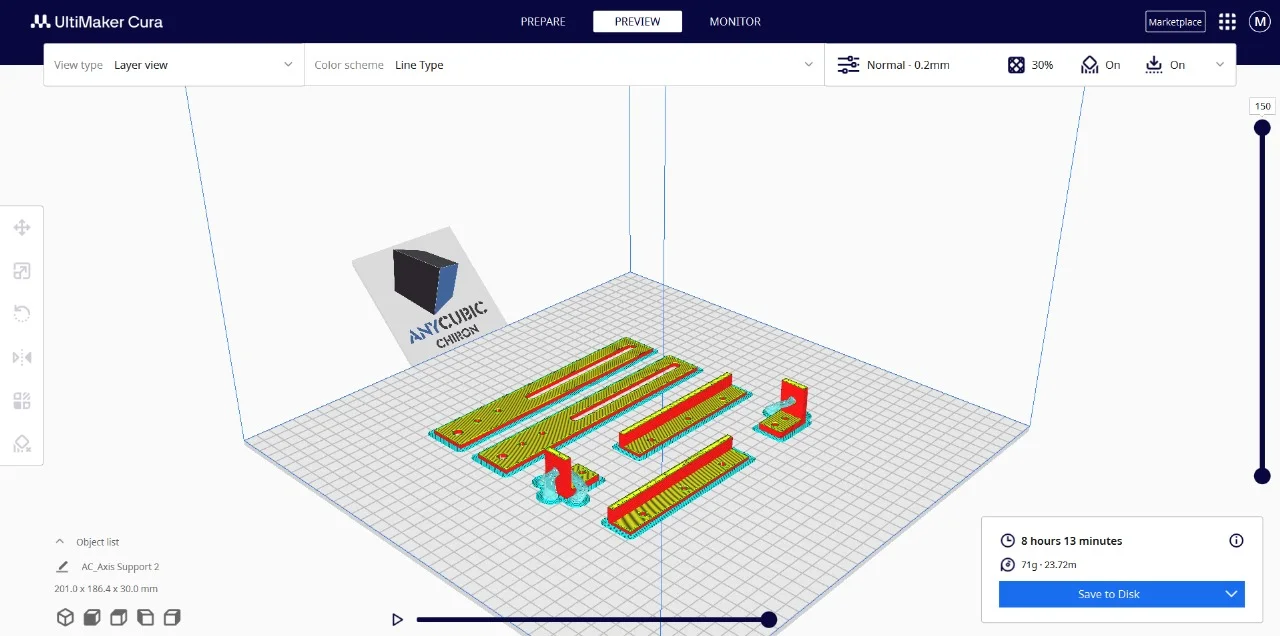
ControlArduinoPCBCATIAMATLABInverse KinematicsForward KinematicsPeter CorkeManufacturing3D PrintingSimulationElectrical DesignProteusKiCADAnsysFEAPower CalculationsTechnical DocumentationManufacturing PlanSafety AnalysisFMEA