
Undergraduate Researcher - Cooperative Sensing for Safer Robot Navigation in Occluded Spaces
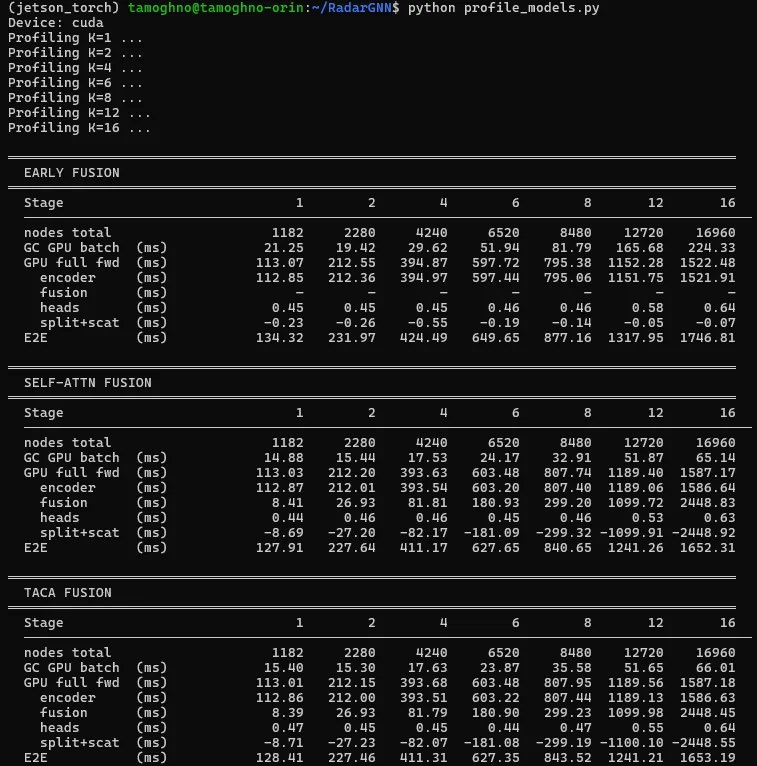
I set up a conda environment on an NVIDIA Jetson and got a radar-to-image translation model running on it. Here are the images of the AGX orin and my output.