

The Build-up
Before the scope was defined for the project, I came up with some cool ways to redefine soft underwater mobile robotics, one being in the form of a jellyfish! Below is a quick video of that design: a 6-legged, pneumatically actuated, buoyancy-driven jellyfish robot. For future perception experiments, I rigged it with an Arduino Beetle and flashing LED's, all waterproofed using silicone rubber. Although a fun project, the scope of research wasn't ideal for publishing material, so I had to pivot to something truly unique.
But wait, there's more!
Core Project
In this new project, the core element of my graduate research at the University of Hawaiʻi at Mānoa, I designed, fabricated, and validated a bio-inspired underwater robotic manipulator for operation in fragile, cluttered, and hard-to-reach environments. The system combines a tendon-driven continuum arm, buoyancy-controlled orientation, and a stiffness-tunable soft end effector with detachable operation modes. Through mechanical design, soft actuator fabrication, controls integration, and underwater testing, this project demonstrates a multifunctional robotic platform for adaptive underwater manipulation.
New Goals
- Develop an underwater manipulator capable of safely interacting with fragile objects and environments.
- Enable variable stiffness so the end effector can switch between compliant and load-bearing operation.
- Use buoyancy modulation for smooth end-effector reorientation without relying on thrusters.
- Expand the operating range through a detachable end effector for confined and hard-to-reach spaces.
- Validate the system through fabrication, modeling, and underwater demonstrations.
System Architecture
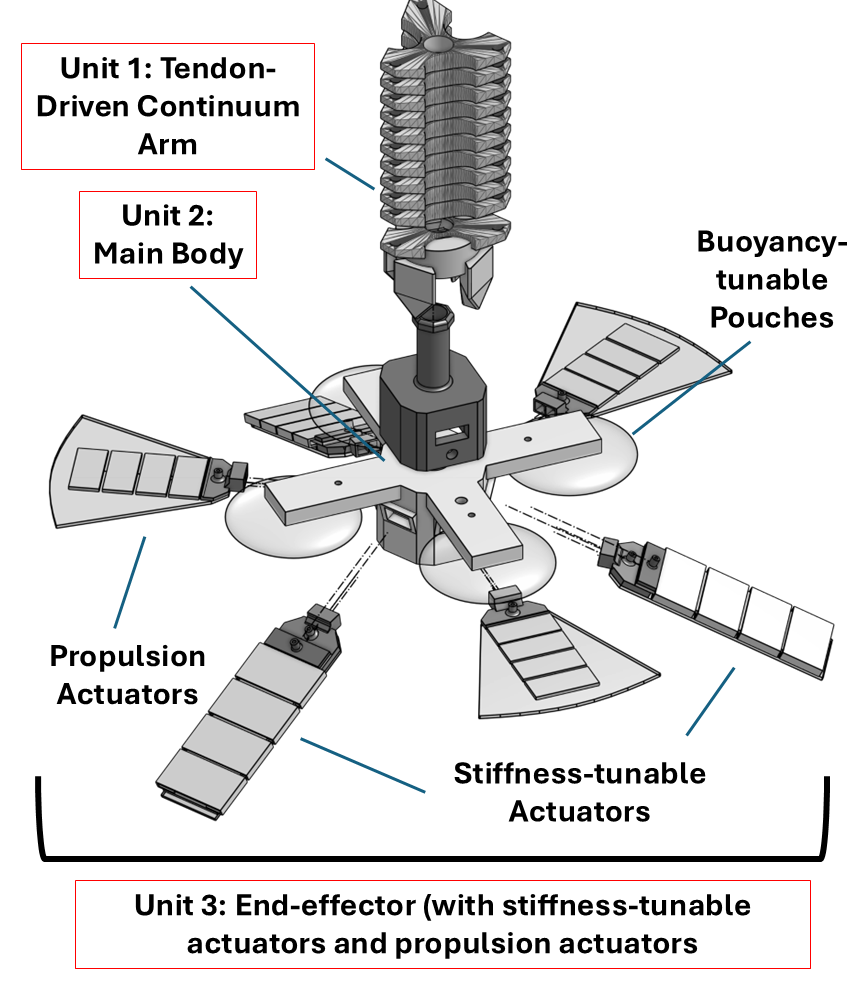
Exploded system architecture showing the tendon-driven continuum arm, buoyancy-tunable main body, and stiffness-tunable end effector with propulsion elements
1) Tendon-Driven Continuum Arm
The continuum arm provides the reach and compliance needed for underwater deployment. Inspired by octopus-like arm motion, it is composed of 36 segmented elements (image cuts off most) with tendon routing along the body for smooth bending and omnidirectional positioning. The distal interface allows the end effector to either remain fixed or rotate in discrete directions relative to the arm.
2) Buoyancy-Driven Main Body
The central body acts as both a structural hub and a pneumatic routing hub. Multiple buoyancy pouches are distributed symmetrically around the main body and can be individually actuated to generate controlled end-effector reorientation. This allows smooth, low-energy underwater rotation while minimizing disturbances to delicate surroundings.
3) Stiffness-Tunable End Effector
The end effector combines soft bending actuators with a vacuum-activated layer-jamming mechanism. In its compliant mode, it can conform to objects of varying shapes for safer grasping. When the jamming layer is activated, the internal friction increases, giving the gripper a significantly stiffer, more load-capable behavior. Propulsion flaps were also integrated to assist in detached retrieval tasks.
Fabrication and Prototyping
A major part of this project involved hands-on fabrication and iterative prototyping. The rigid body and arm segments were manufactured through 3D printing, while the buoyancy pouches and bending actuators were fabricated from heat-sealed plastic films. The variable-stiffness mechanism used a dedicated vacuum pouch containing friction layers made from sandpaper to create a compact jamming structure (results discussed later).
The system required balancing manufacturability, compactness, routing complexity, and underwater functionality. Pneumatic lines were routed through the rigid central hub to reduce interference with objects and simplify subsystem integration. The bending and jamming layers were independently actuated, which improved modularity and made isolated mechanical testing possible.
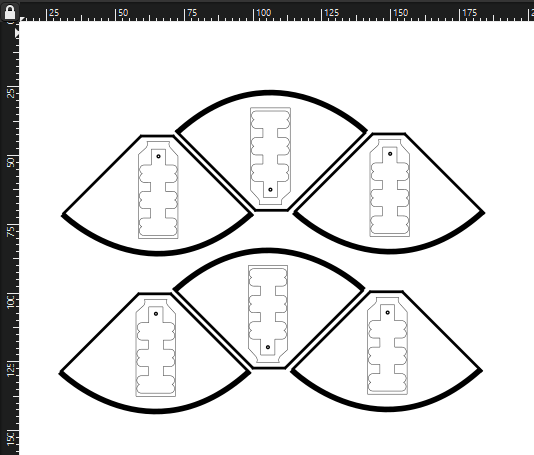
Each propulsion actuator was constructed by heat sealing plastic films, with an inlet for air to pass through.
The stiffness-tunable gripper actuator was fabricated similarly with a smaller footprint.
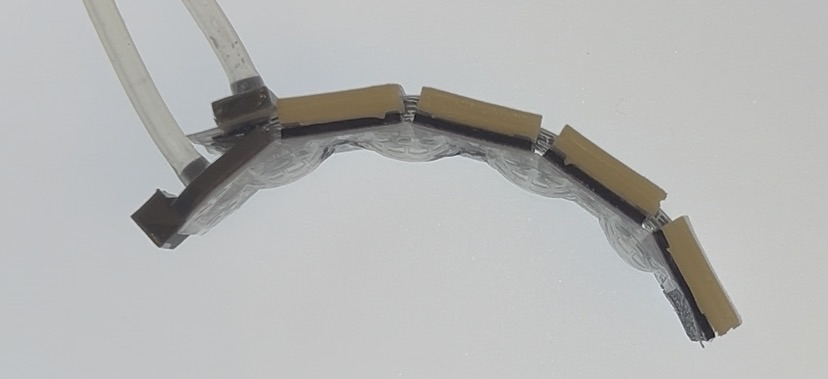
Bending demonstration of the stiffness-tunable gripper actuator.
Each pouch inflates sequentially, creating a bending motion against the unconstrained side.
The inner-most nozzle is connected to the jamming layer.
Controls and System Integration
The manipulator was designed as a multi-subsystem robotic platform. Independent pneumatic channels were assigned to the buoyancy pouches, stiffness-tunable actuators, and propulsion actuators, allowing coordinated control of orientation, grasping, stiffness modulation, and detached retrieval. A combination of stepper motors and servo motors were integrated, optimizing function depending on the actuator it controls.
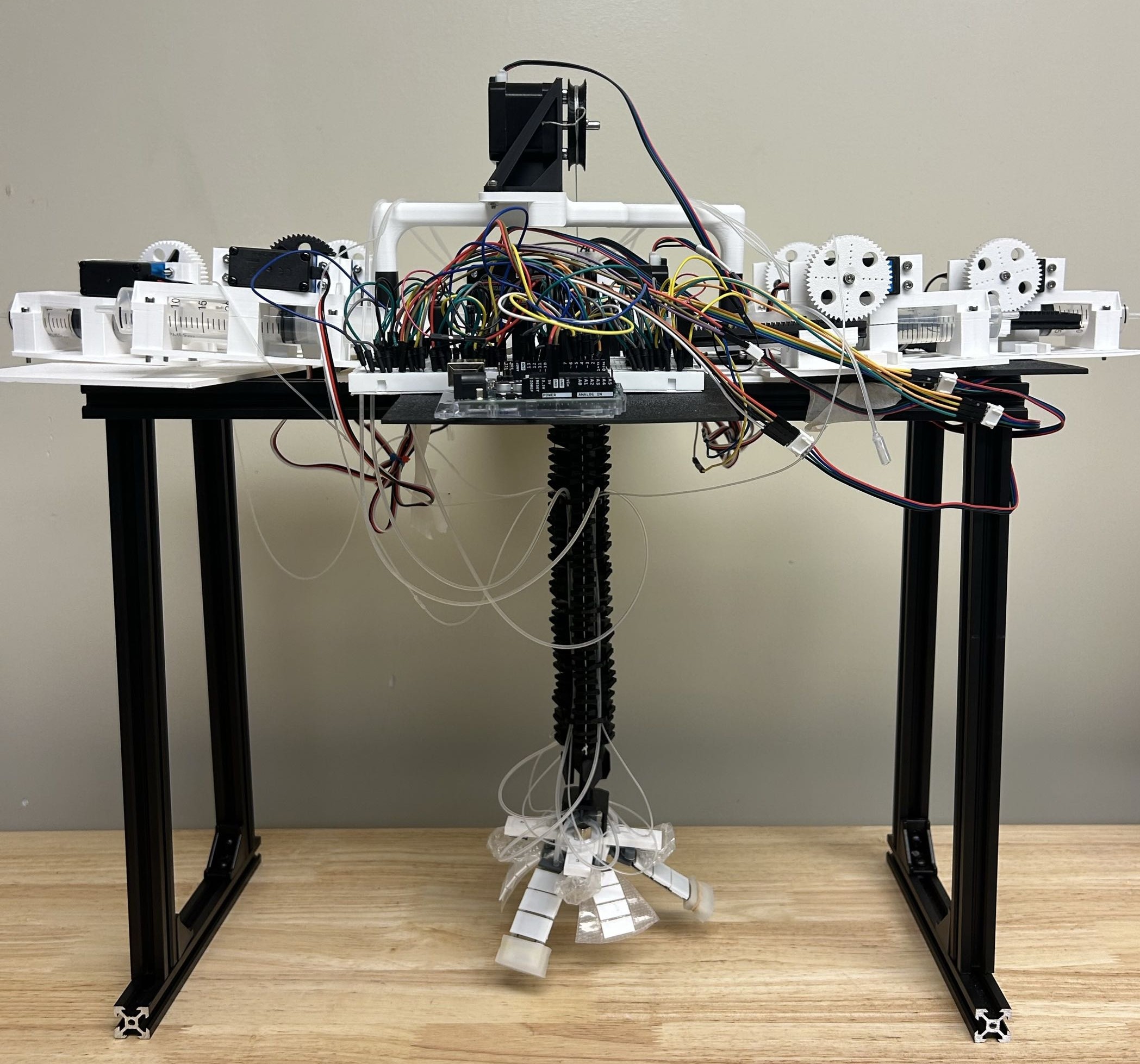
High level overview of the demonstrated system. Servo motors were attached to custom-made rack-and-pinion
mechanisms that push air through syringes, while steppers were used for tendon actuation of the continuum arm.
On the controls side, I developed the actuation workflow needed to operate the platform underwater during experiments and demonstrations. The hardware architecture used externally supplied pneumatic actuation through flexible tubing and servo-driven syringe mechanisms, while the software side used ROS 2-based control workflows for subsystem command and testing. This work required integrating mechanical hardware, fluidic actuation, and robotic control into one functional experimental system.
Modeling and Mechanical Validation
To understand the dynamic behavior of the buoyancy-driven orientation system, a rotational equation of motion is developed for the end-effector. The model describes how the end effector responds to when a single buoyancy pouch is suddenly inflated. It is then compared against experimental data collected from video tracking.
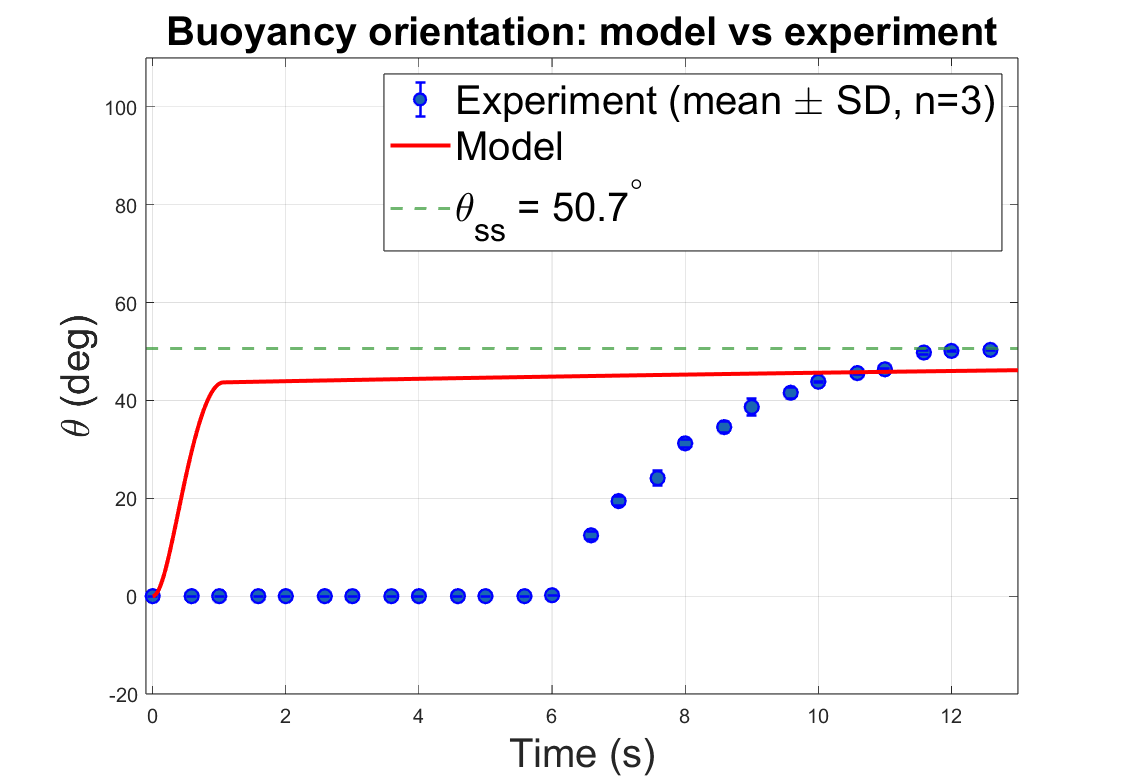
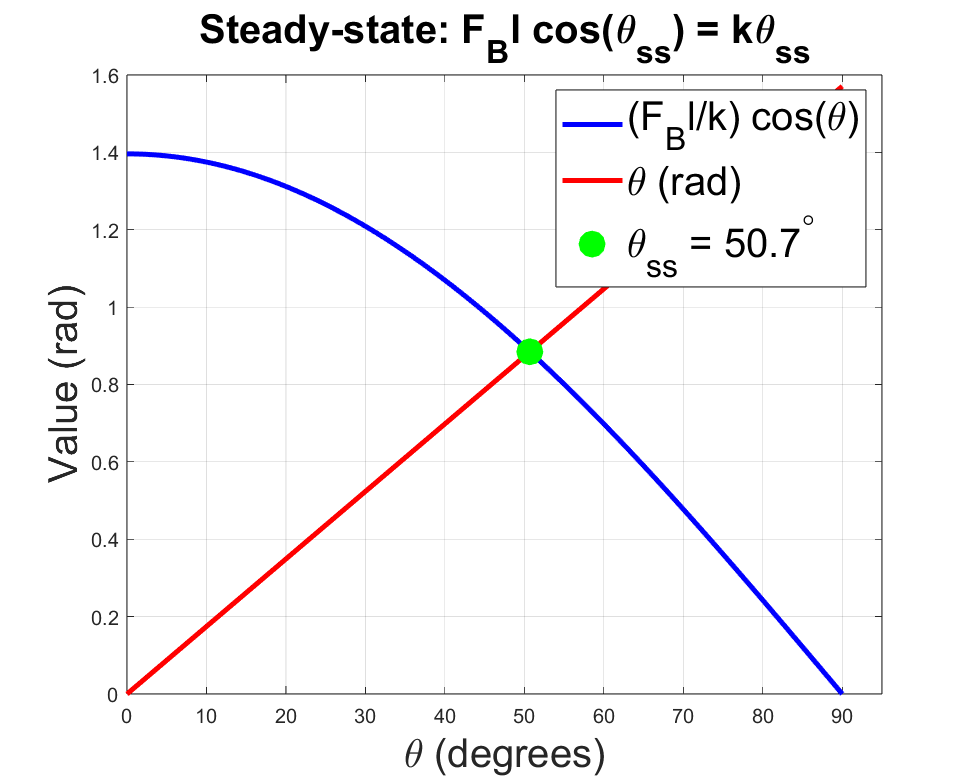
Comparison of the buoyancy-driven orientation model with experiment.
Left: Time response of end-effector rotation after actuation of a single buoyancy pouch, showing experimental prediction.
Right: Graphical steady-state solution giving an equilibrium angle of 50.7°.
Additionally, I developed a quasi-static modeling framework for the end effector's stiffness-tunable gripper actuators. The jamming layer was first isolated experimentally, and midpoint-loading tests were used to identify an effective pressure-dependent bending stiffness as a function of applied vacuum. That stiffness function was then used to predict deformation in both midpoint and distal loading configurations.
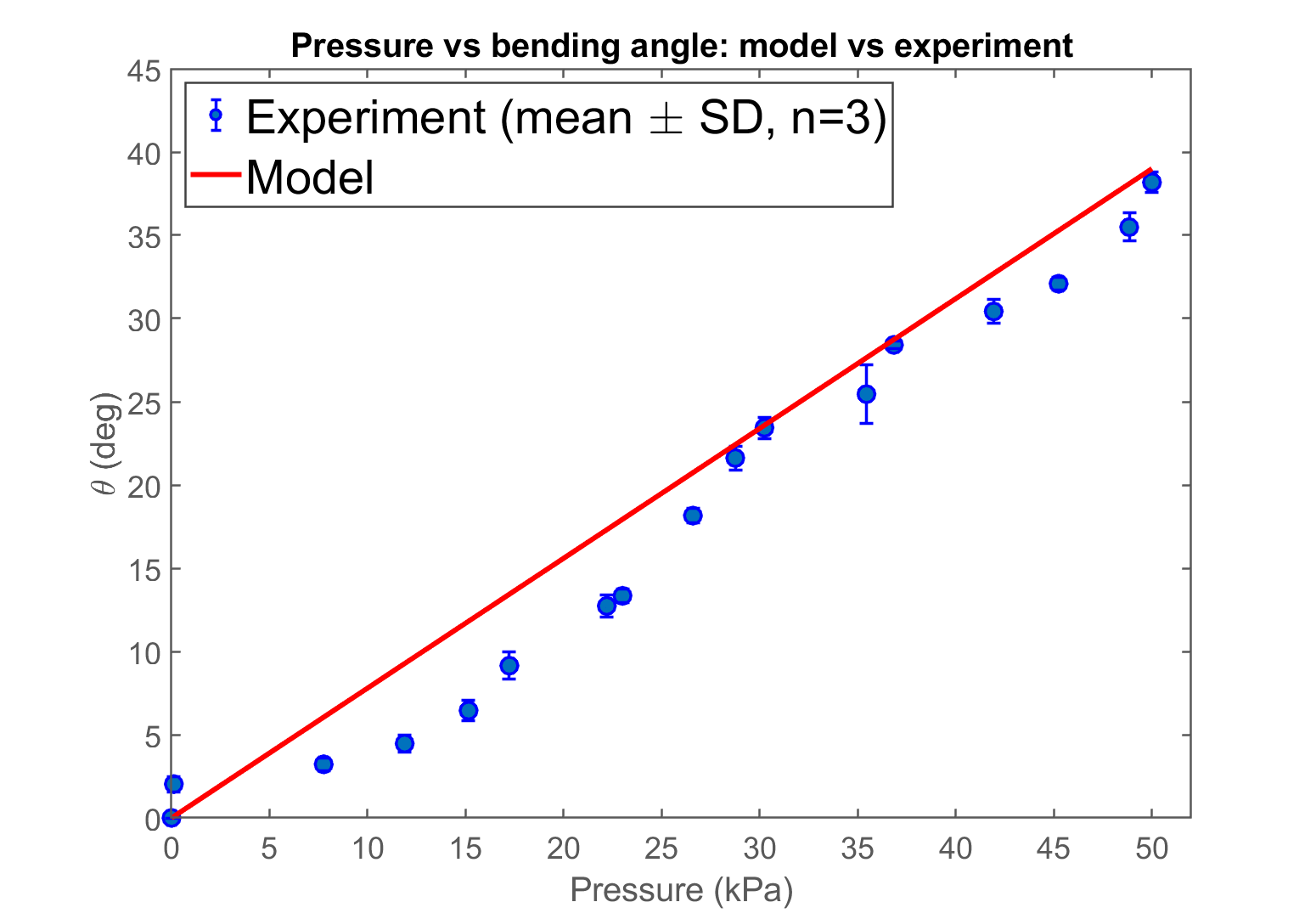
The figure compares the model-predicted bending angle with the experimentally measured pressure-bending response of the gripper actuator.
The experimental data are shown as mean ± standard deviation across three trials, and the model is plotted as a direct prediction of bending angle versus pressure.
The modeling was important because it moved the work beyond a visual prototype. The experiments established a measurable relationship between vacuum pressure and mechanical resistance, and showed that the same identified stiffness behavior could be used to predict gripper deformation under different load cases without additional fitting.
Underwater Demos
Let's see it in action! The manipulator was evaluated through several underwater demonstrations designed around representative task types for marine robotics.
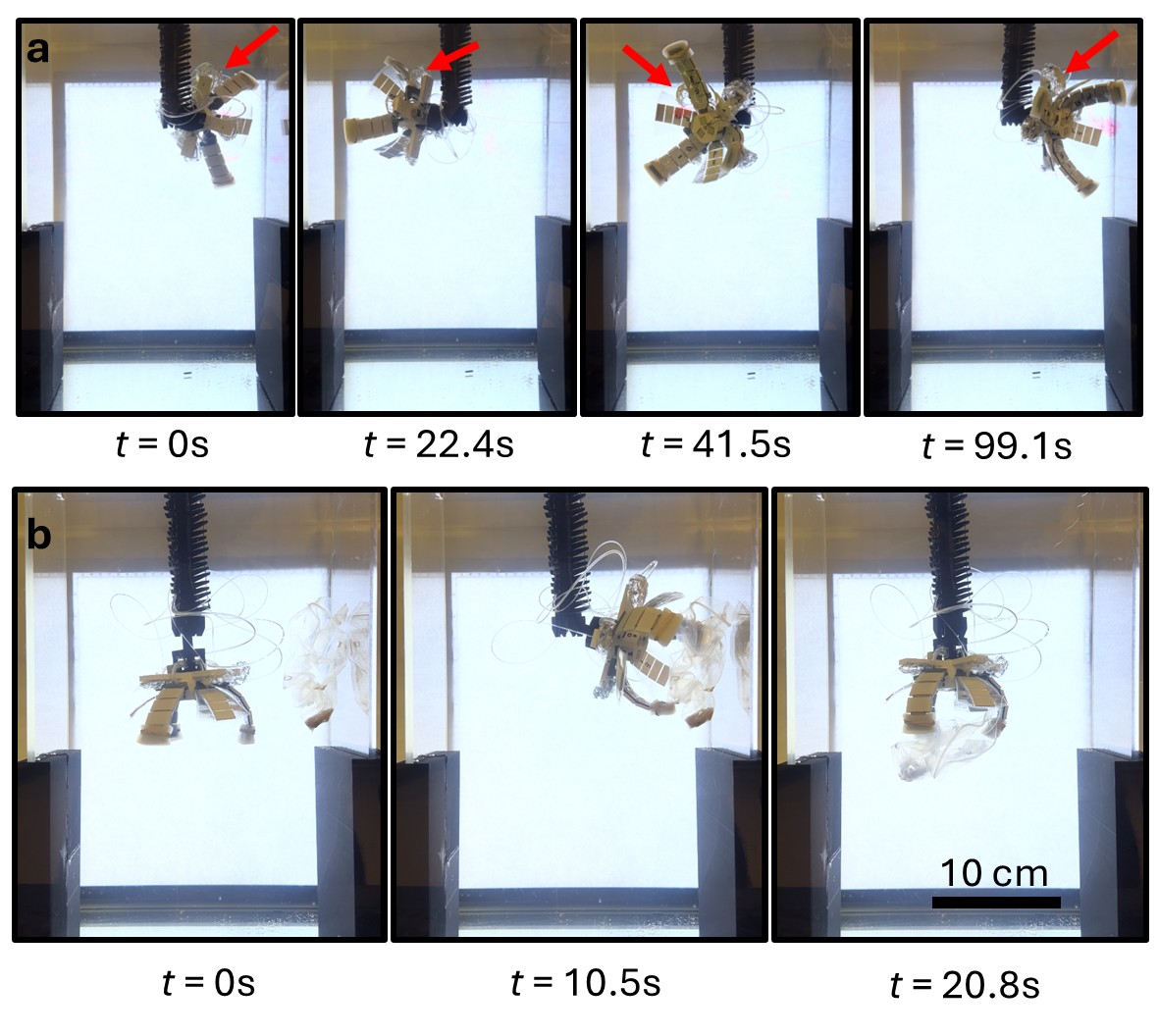
(a) By actuating individual buoyancy pouches, the end effector could be reoriented predictably in the water. This enabled smooth underwater rotation up to approximately ±180° without relying on continuous thruster-based control. (b) In the arm-attached mode, the end effector remained connected to the continuum arm but could locally reorient itself while the arm stayed relatively fixed. This reduced the need for large arm motions and improved accessibility in cluttered environments.
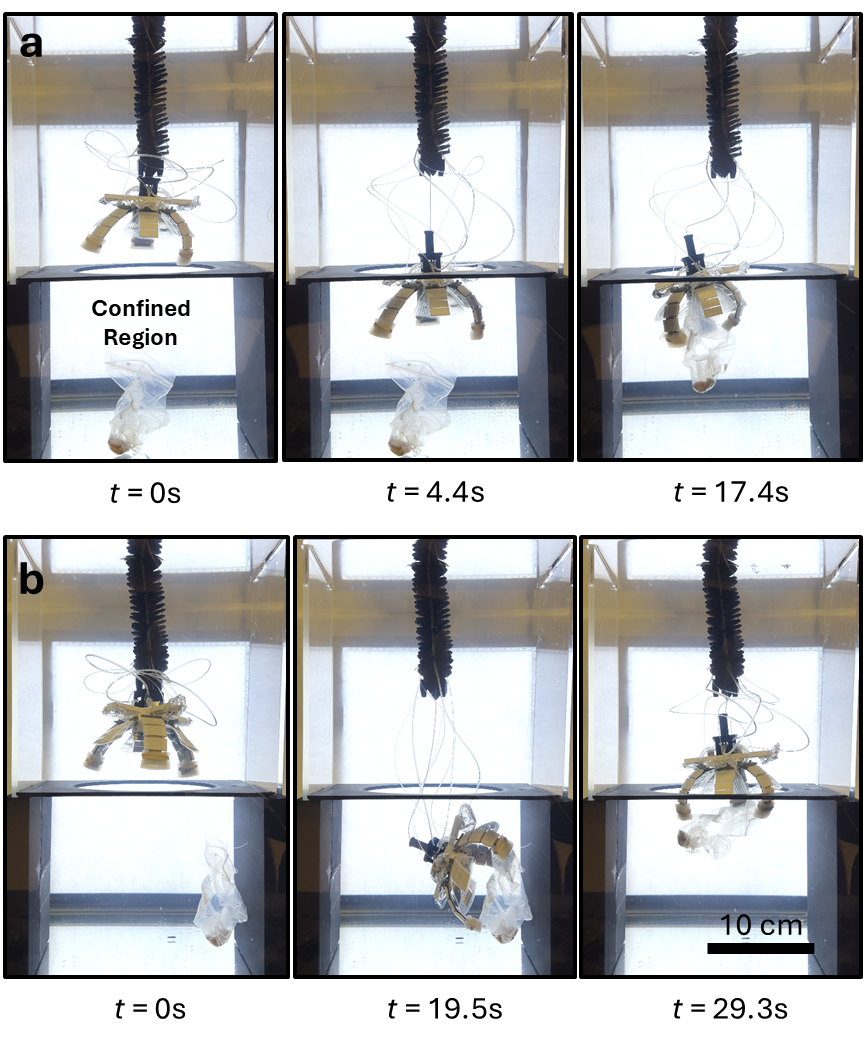
One of the most distinctive features of the platform was the detachable end effector. In detached mode, the end effector operated independently using buoyancy and propulsion, allowing it to perform deep grasping and object retrieval in areas beyond the normal reach of the arm. Panel a shows perpendicular dee grasping and panel b show side deep grasping.
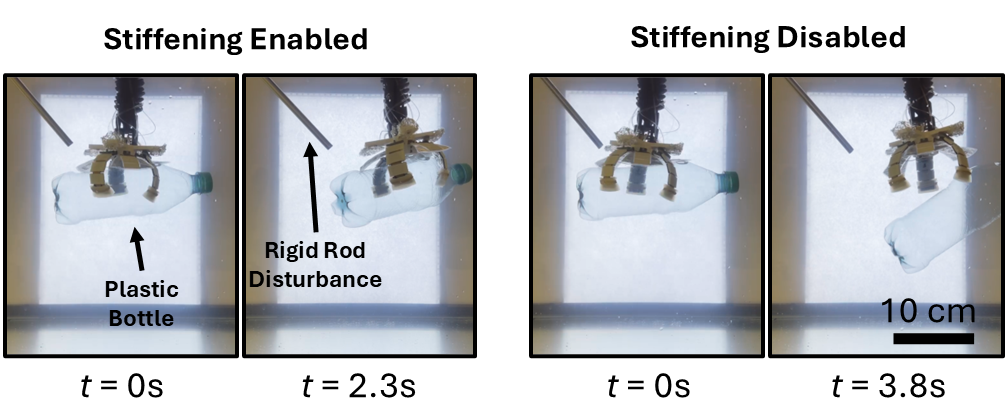
The system also demonstrated the practical value of variable stiffness. In the compliant state, the end effector could gently conform to fragile objects. In the stiffened state, it better resisted deformation and improved stability during grasping and transport.
See It In Action!
Key Outcomes
- Designed and built a multifunctional underwater robotic manipulator combining continuum positioning, buoyancy control, and variable stiffness.
- Demonstrated more than 2× stiffness change using vacuum-activated layer jamming.
- Achieved buoyancy-driven reorientation up to approximately ±180° underwater.
- Developed a detachable end-effector concept for manipulation in confined and hard-to-reach environments.
- Integrated soft actuator fabrication, mechanical design, controls, and experimental testing into one prototype platform.
- Validated the stiffness-tunable gripper through load-based experiments and model-supported analysis.
Reflection
This project reflects my interest in underwater robotic systems that go beyond concept design and into full physical implementation. It required hands-on engineering across CAD, fabrication, mechanism design, controls integration, pneumatic actuation, and experimental validation. From a job perspective, it demonstrates my ability to build and test complex electromechanical and robotic prototypes, especially in challenging marine and soft robotics applications.
This was one of the most complete engineering projects I have worked on because it brought together design, fabrication, controls, and experimentation in one system. I especially enjoyed the iterative prototyping process: building the hardware, testing what worked and what did not, and refining the system to make the final platform more modular, functional, and experimentally useful. It strengthened my interest in underwater robotics, rapid prototyping, and system-level integration for real-world robotic platforms.
Improvements and Future Work
- Add onboard sensing for closed-loop orientation and grasp control.
- Improve detached navigation and retrieval through more autonomous control.
- Integrate perception for object localization and task planning.
- Further optimize the actuator architecture for compactness and robustness.
- Expand validation into more field-relevant underwater environments.