The goal of this project was to determine the mechanism for a hand cranked toy and recreate it using SolidWorks.
SolidWorks
Robot Autonomy Projects
These projects were to learn concepts for robotic autonomy. The robot was programmed in a ROS environment and its sensing for control was done using a LiDAR sensor.
The goal of the project was to design a convolution neural network (CNN) using TensorFlow for computer vision.
TensorFlowConvolutional Neural Network Design
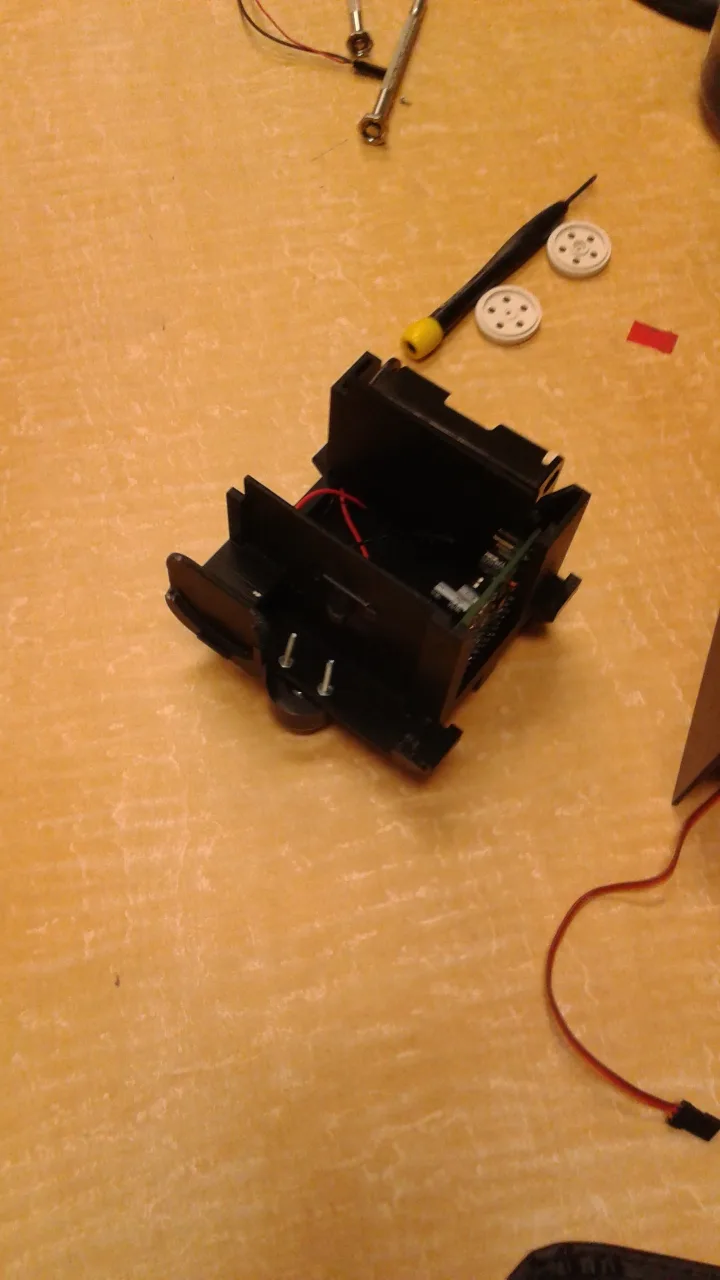
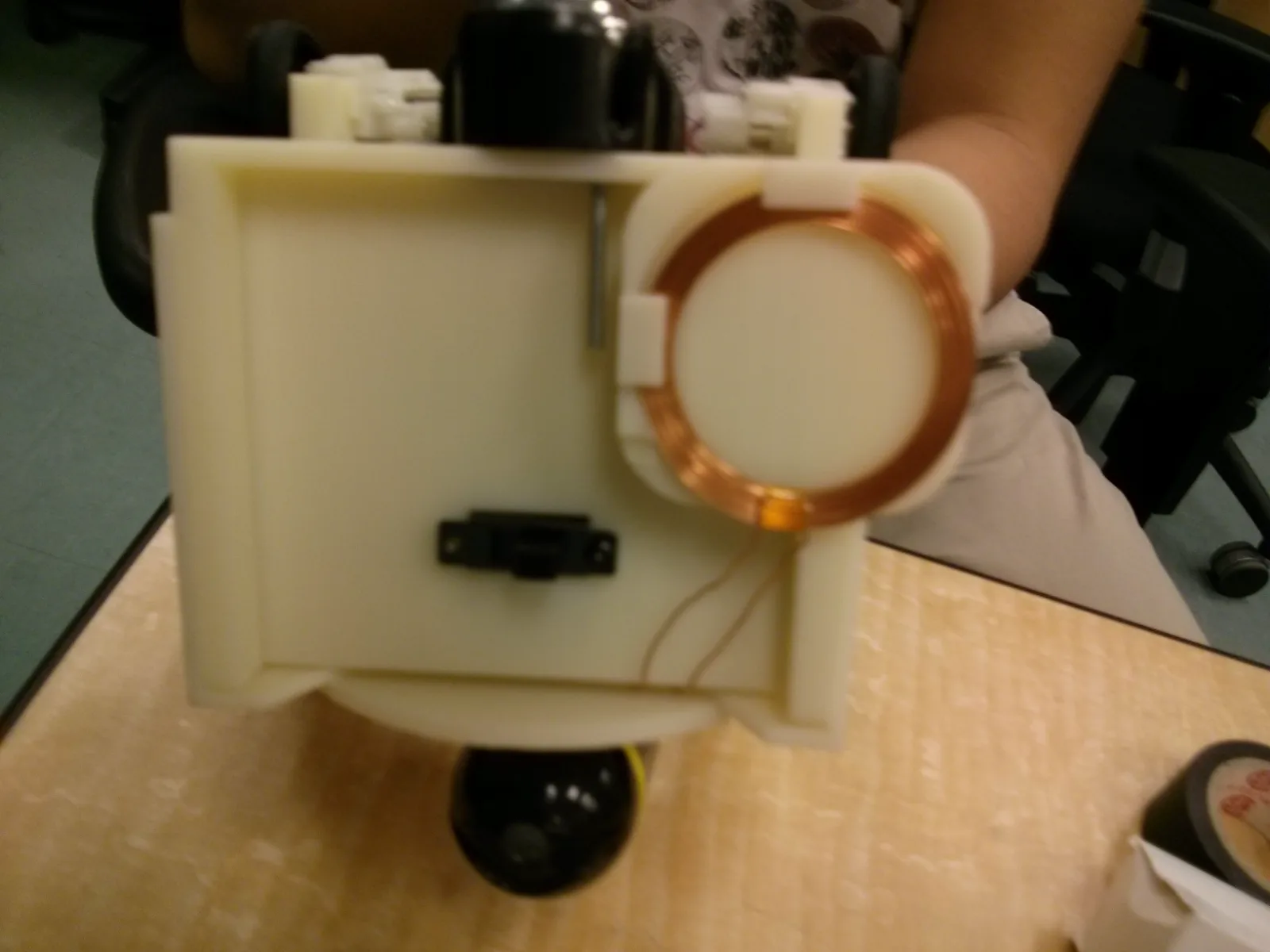
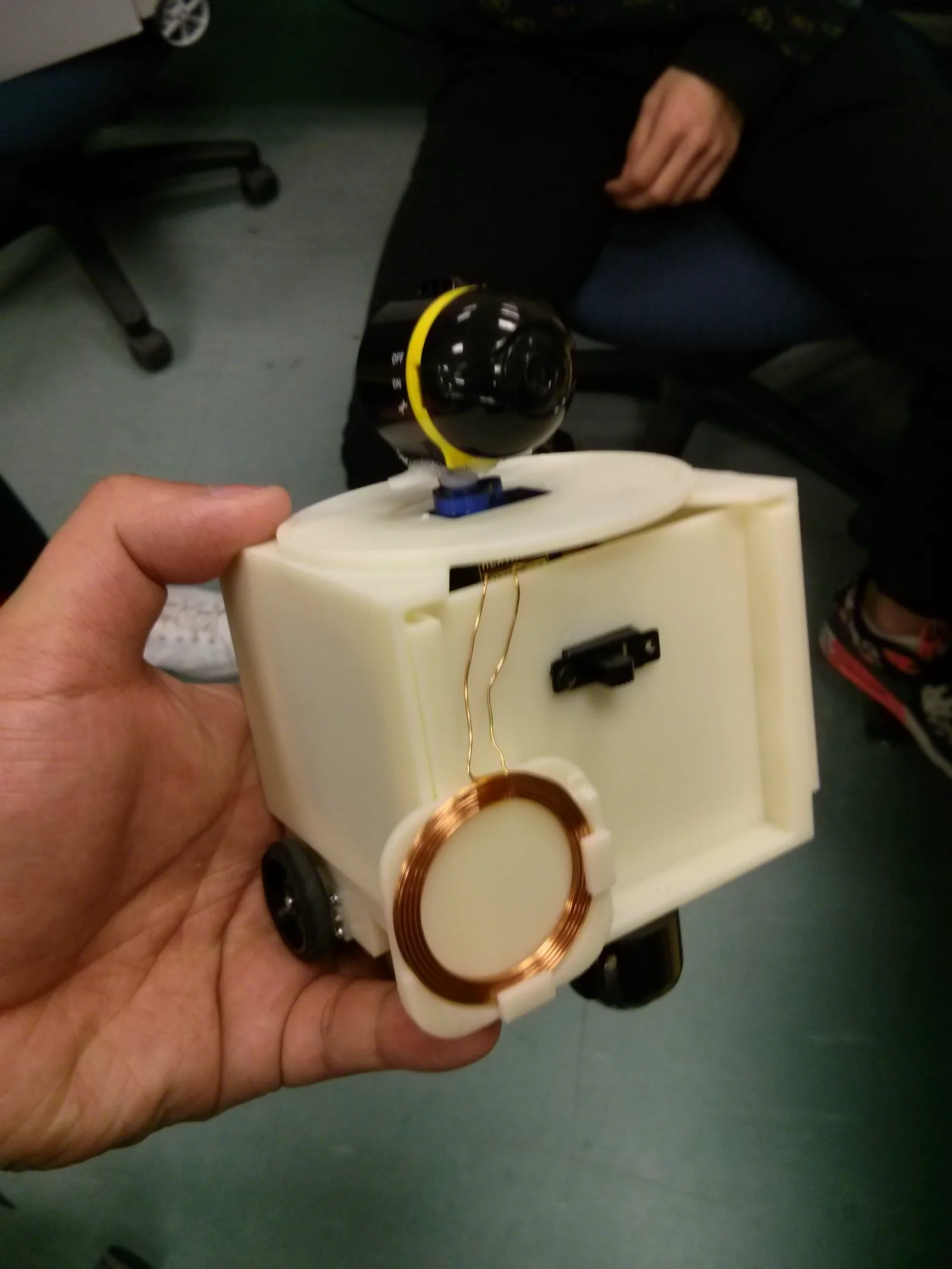
Custom Robot Design
The goal of this project was two-fold-
1. Write code in C++ to identify QR codes and map specific codes to robotic commands
2. Design a robot chassis in SolidWorks to house a custom PCB and mount servo…
Graduate Thesis - Pose Estimation and Graphical Reconstruction
MASc. thesis project that reconstructs the pose of a subject in a defined test space and reconstructs the pose of their upper body and legs and graphically reconstructs this pose in…
Was part of a development team to create an automated hydroponics system which turned on the LED light array and turned on the sprinklers on a timer with each plant type having its own specific timer. The preset timer values can be adjusted.
Role on the team was to write the code to program the…
- Programming in RAPID- Socket communication in Python
Allego Hand Imitation and Behavoural Learning Demo
Generated a Python script that leveraged the Allegro environment dataset to generate an imitation policy. Developed a second Python script which employed the generated policy to train a four fingered hand to grab a cube and present the training process using graphical…
Remote Computer Performance Monitor (perfmon)
Created a tool in Python that queries the CPU, RAM and Disk usage and internal temperature for multiple endpoints. The tool is fully scalable as needed and compatible with both Linux and Windows platforms. Currently looking to test the tool on a MacOS…