Modular Self Reconfigurable Continuum Robot
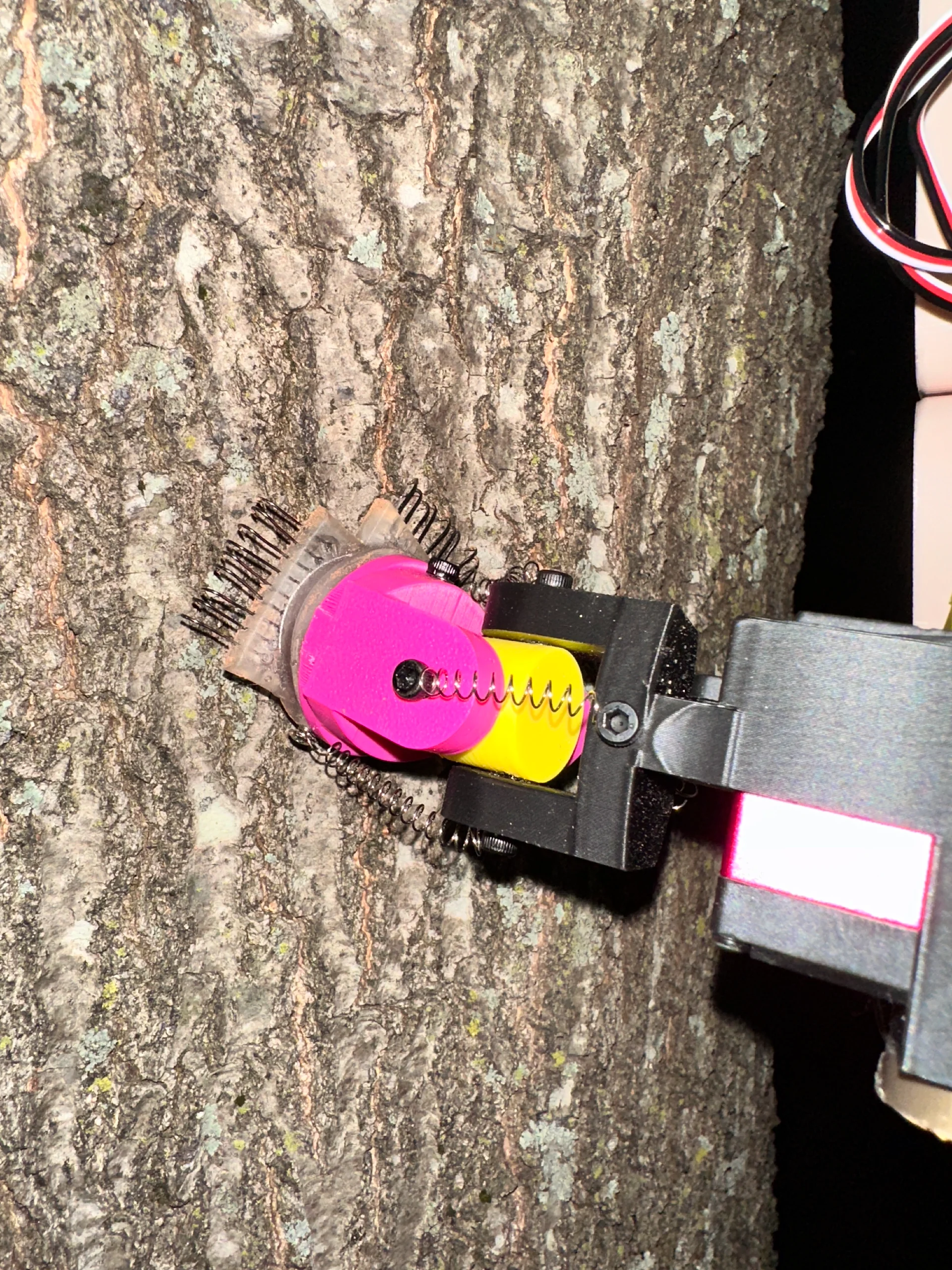
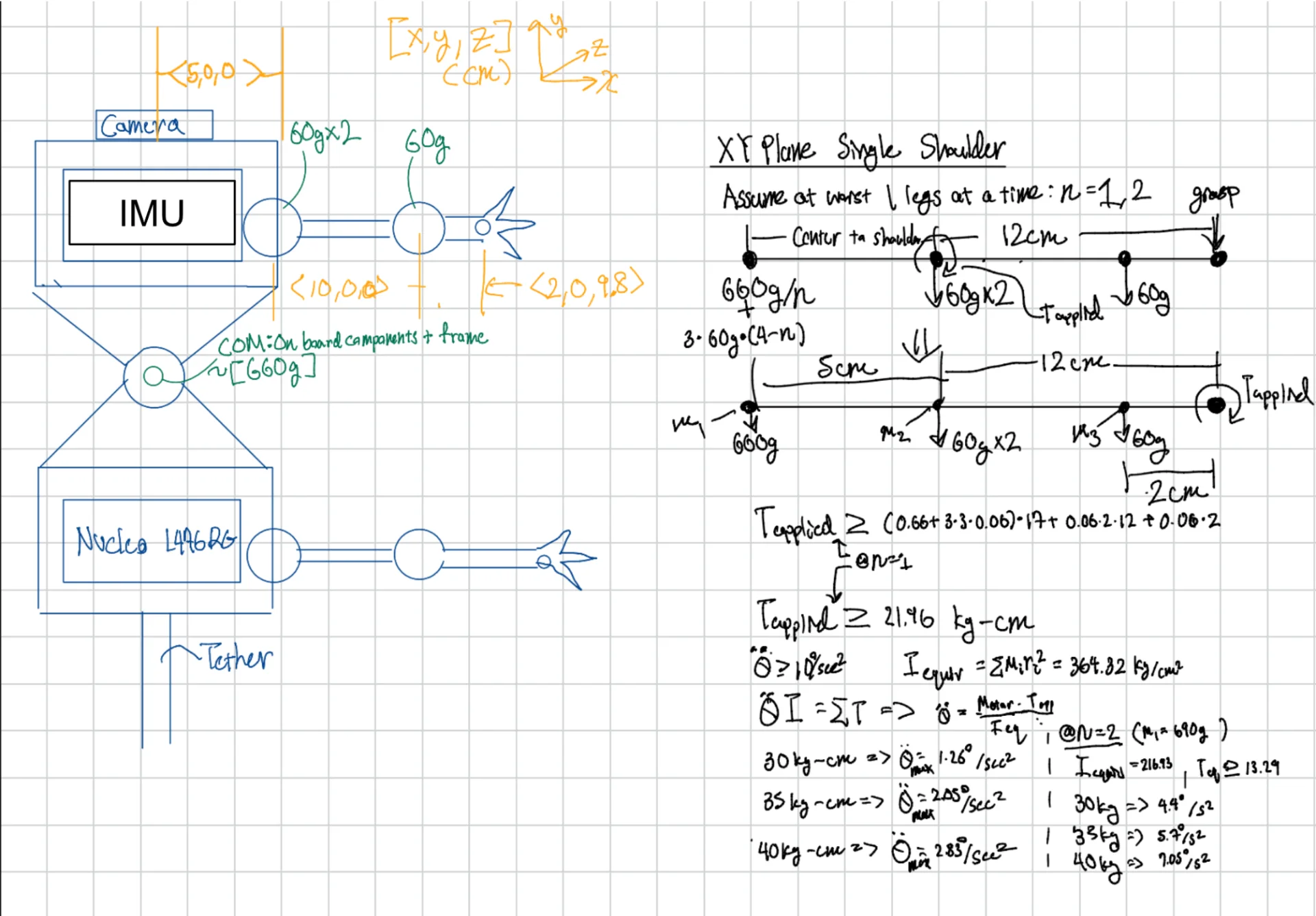
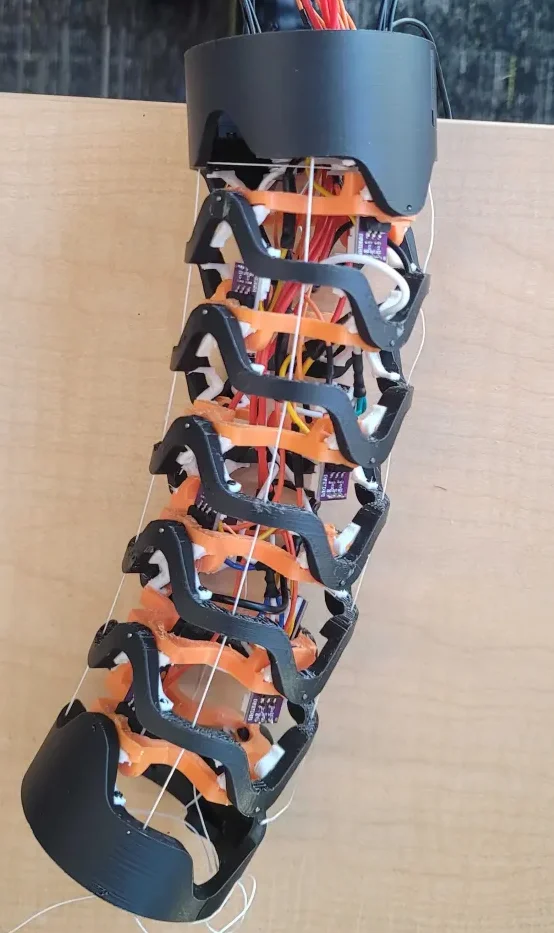
Through the BM2 lab at Georgia Tech, phD student Yilin Cai and I are working to develop the V2 of the MSRCR, a continuum robot which through connecting with other MSRCR's can execute various modes of locomotion and manipulation.
Information on V1:…
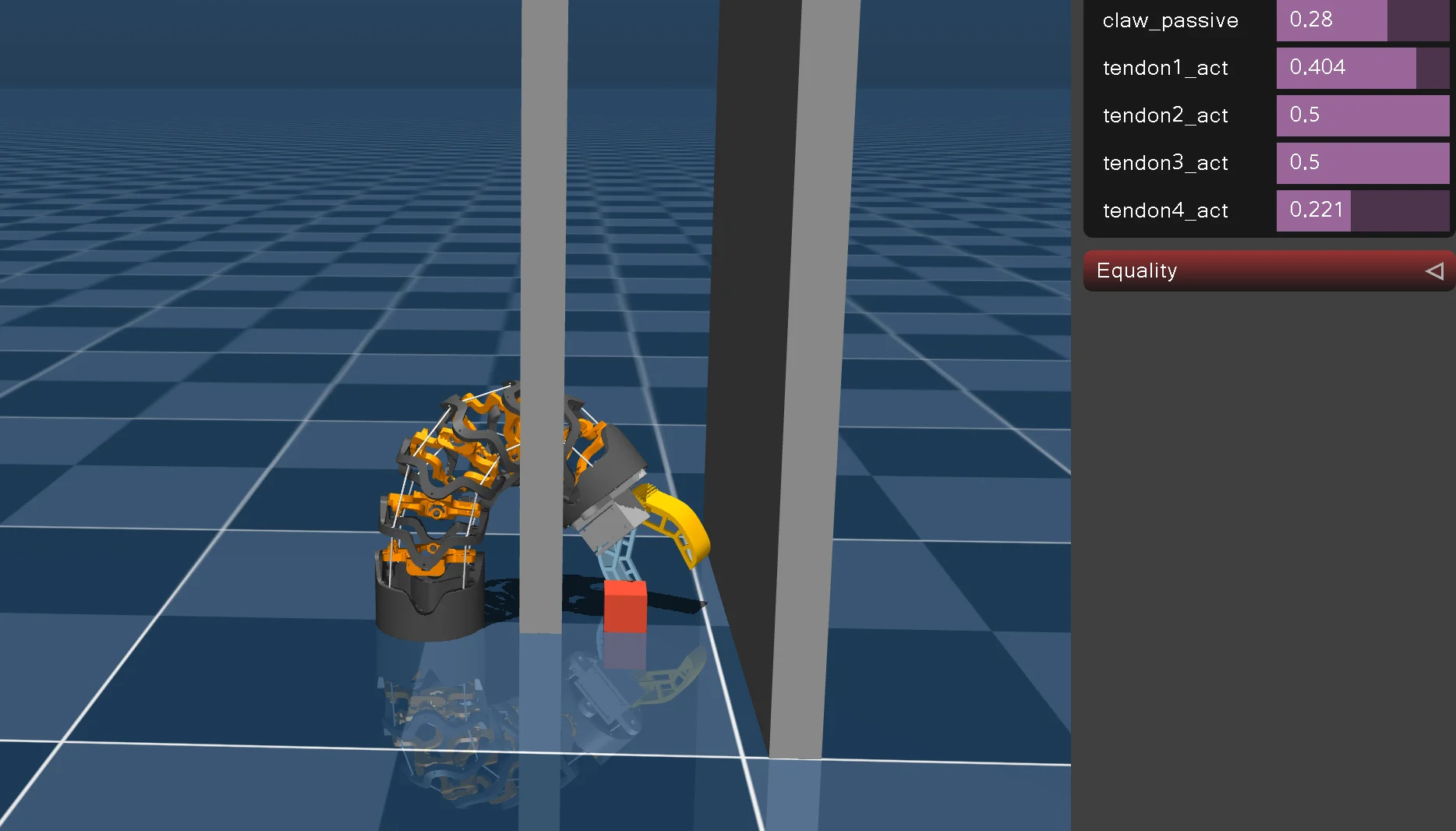
MuJoCo (Robot Simulation)OnShape (CAD)Ansys WorkBench (FEA)Matlab (Kinematics Simulation)