

Technical Validation & Design Details
Light Intensity Characterization: Empirical PPFD testing quantified the relationship between LED fixture height and canopy light delivery, identifying an optimal operating distance of approximately 0.35 m used to define lift travel limits and control setpoints.
Canopy Height Sensing: Ultrasonic sensor validation demonstrated a typical measurement error of approximately 24 mm, meeting design tolerances and supporting conservative canopy-responsive positioning at the subsystem level.
Energy Efficiency: Comparative analysis showed that dynamically adjusting light height can reduce lighting energy demand by approximately 43% relative to fixed-height operation, with negligible power draw from the lift mechanism.
Safety & Risk Mitigation: A formal Failure Modes and Effects Analysis (FMEA) informed safety-critical design decisions, including mechanical travel limits, limit switches, and an electromagnetic brake to prevent uncontrolled motion
.png)
Figure 1: Measured PPFD as a function of LED fixture height, used to determine the optimal light-to-canopy operating distance (~0.35 m).
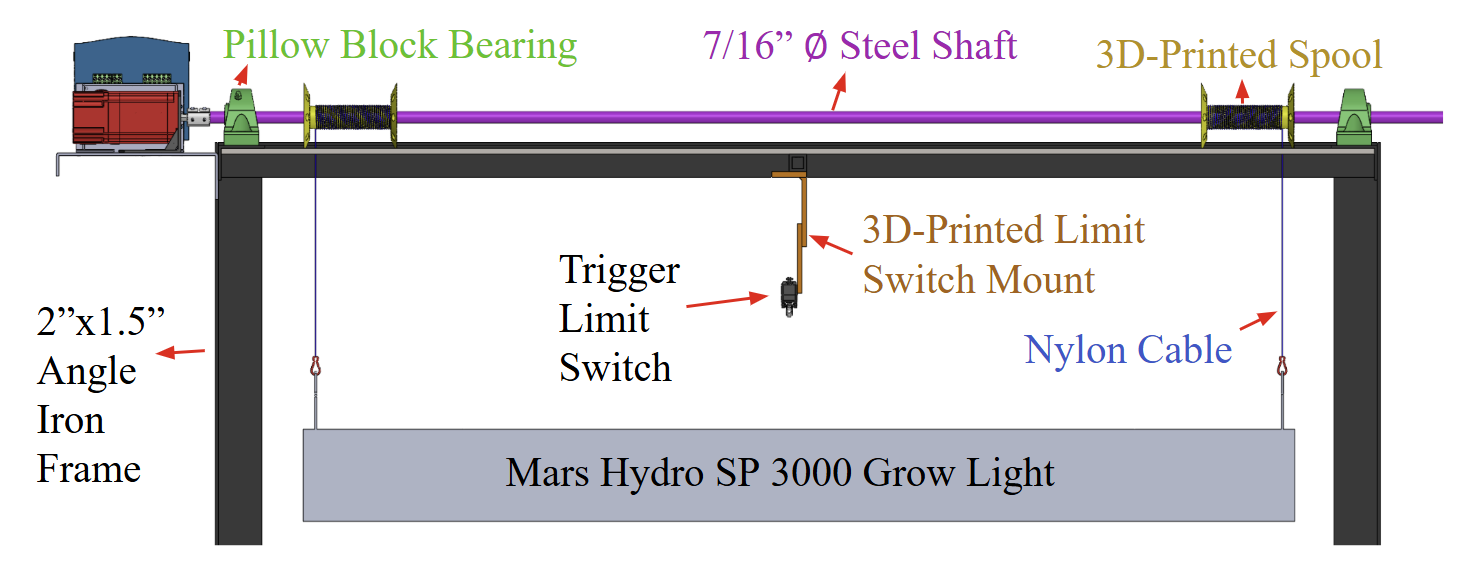
Figure 2: Section view of the winch-driven lighting lift mechanism integrated above the FarmBot growing bed.
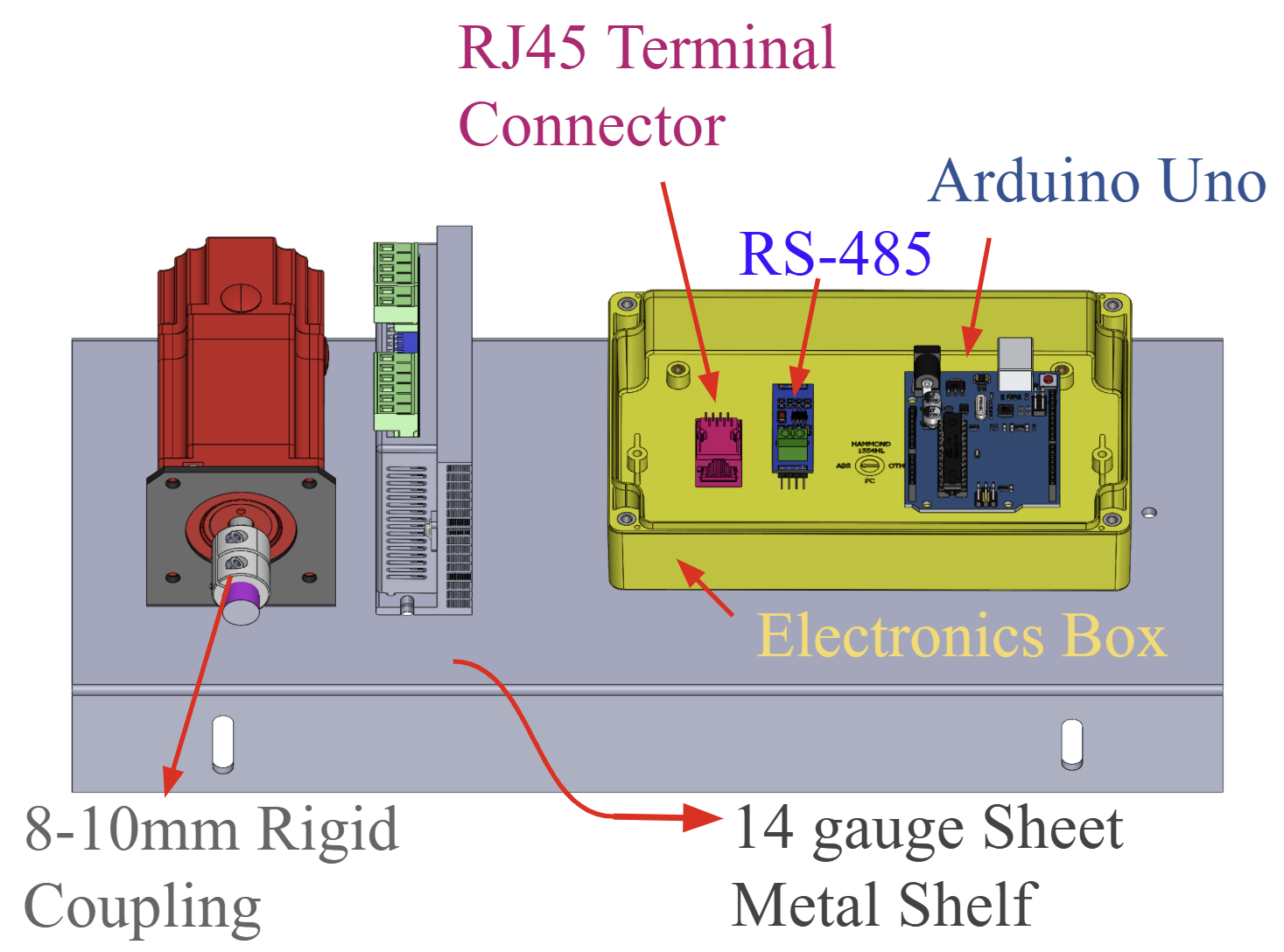
Figure 3: Electronics mounting shelf supporting the stepper motor, motor driver, and Arduino-based control hardware.
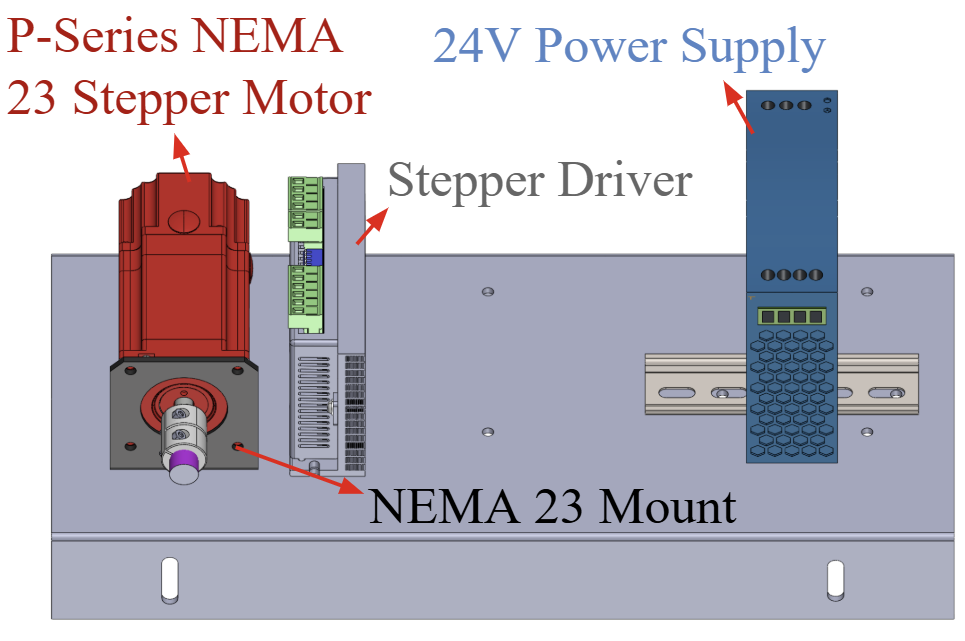
Figure 4: Electronics mounting shelf supporting the stepper motor, motor driver, and power supply.