


Goals
A solution for when you are away from home or too busy to take care of your plants.
Idea Generation

Use computer vision to detect MULTIPLE AR tags (multiple plant pots.)
Use LIDAR sensor to detect and avoid objects in its path in real-time.
Stop, with the appropriate orientation, when reach desired location and start looking for other AR tags in queue.
Built the robot.
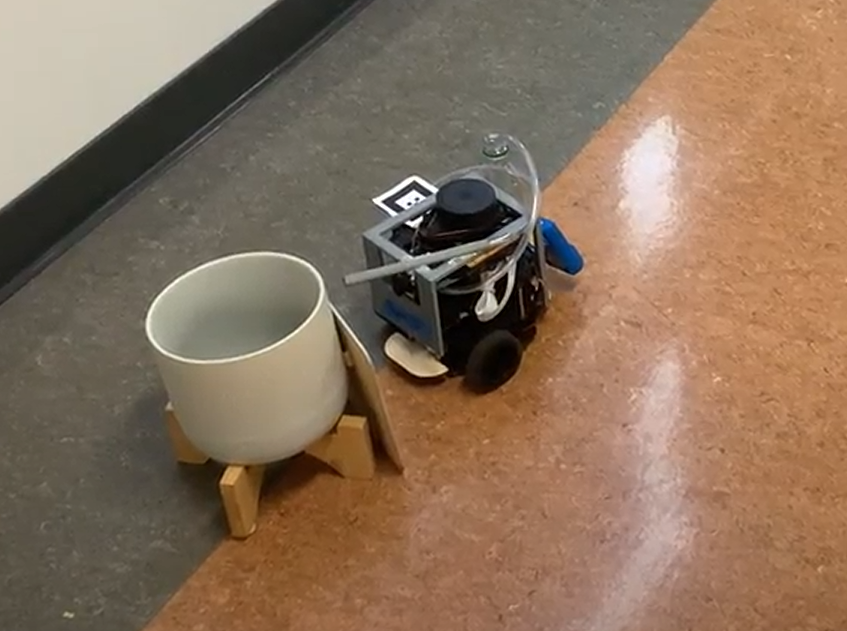
- We built the robot based on the turtlebot available in lab, with the addition of camera mounting and water tank/watering arm mounting.
- Design the robot. We designed the basic mounts and the arm using CAD (Solidworks).
- Construct the robot. We fabricated the mounts and the arm by 3D printing to make sure everything fits perfectly.
We programmed the robot using ROS
- Developed node 1. This node will be responsible for publishing data from the attached camera.
- Developed node 2. This node will be responsible for publishing data from the attached LiDAR
sensor. - Developed node 3. This node will be responsible for subscribing to the camera data topic and will publish directions to the directions topic.
- Developed node 4. This node will be responsible for subscribing to the LiDAR data topic, as well as the directions topic and will be responsible for deciding whether our path is achievable. If the path is achievable, the node will publish the directions to the turtlebot controller. If the path is not achievable, we will send a request to the path finder service.
- Developed node 5. This node will fulfill the path finder service, it will publish to the turtle bot controller navigation instructions according to a search algorithm, and will subscribe to the LiDAR sensor to continually search via the algorithm until a task is found.
- Extended goal. Integrate the position of the robot with the water pump. When the robot reaches the AR tag, signal the water pump to start.

ROS implementation
Challenges
- Implementing the built-in Raspi Camera (low resolution, bad transformation)
- LIDAR sensor is too high so the robot does not fully track the objects in front of it (chair legs, foots, etc.)
- Not being able to implement the DC water pump since we cannot interact with the Raspberry Pi board
- The watering arm is lower than the AR tag, which defeats the watering purpose
Final Results
Designed and programmed a prototype TurtleBot with ROS for optimizing path planning, integrating AR tracking and LiDAR detection that achieved 100% obstacle avoidance accuracy test cases after mapping a 30 m² area autonomously.