


Goals
Automate commercial storage facilities using a smart robot to locate, organize, and store inventory efficiently and effectively to reduce the amount of used space and manual labor.
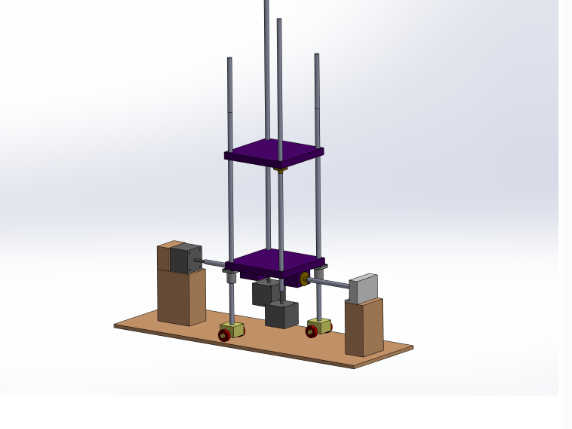
Concept Drawing

Components used
Hardware
- 3x Stepper Motors (42 N-cm)
- 1x Linear Actuator (2 kg – 100 mm)
- 3x 5mm to 8mm Shaft Couplers
- 2x Flanged linear bearing
- 2x X Tr8x8 500mm Lead Screws
- 1x X Tr8x8 350mm Lead Screw
- 2x 8mmx400mm Shafts
- 4x Tr8x8 Threaded Inserts
- 5x 8mmx22mmx7mm Bearings
- Various Screws and Nut
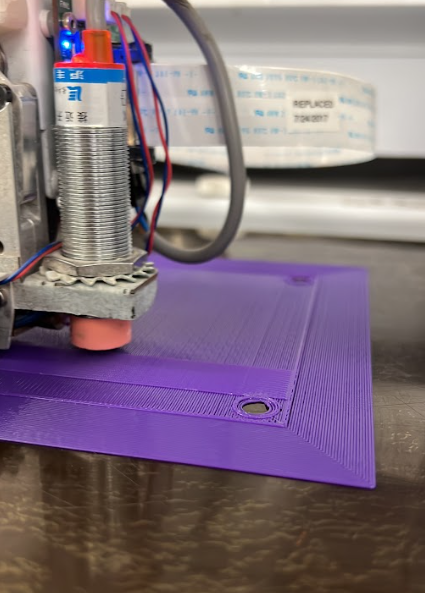
Custom Parts
- 3D Printing with PLA
- Bottom & Top Main Platforms
- Horizontal Lead Screw Support
- Pillow Block Bearing Housing
- Wheel Support
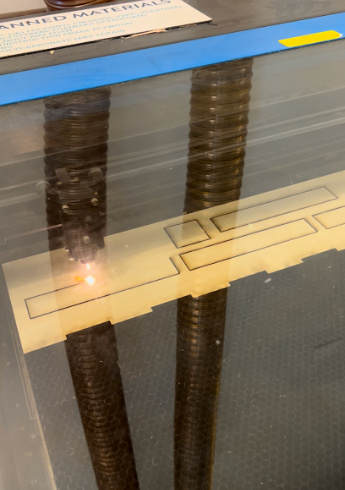
- Laser Cutting with Plywood
- Base Platform
- Linear Actuator Housing & Guide
- 508 mm x 254 mm x 127 mm Shelf
- Horizontal Bearing & Stepper Motor Base
- Vertical Stepper Motor & Flange Linear Bearing Support
Circuit
- 1x Circuit Breadboard
- 2x A4988 Motor Drivers
- 2x 5v Relays
- 2x 47 µF Capacitors
- 1x Linear Actuator
- 3x NEMA 17 Stepper Motors
- 1x ESP32
- 12V Power Supply

Final Product

Successfully built a functioning prototype of our concept, capable of transporting 15lb loads to designated slots with ±0.2 mm
positioning accuracy. However, many limitations still apply.