


What and How?
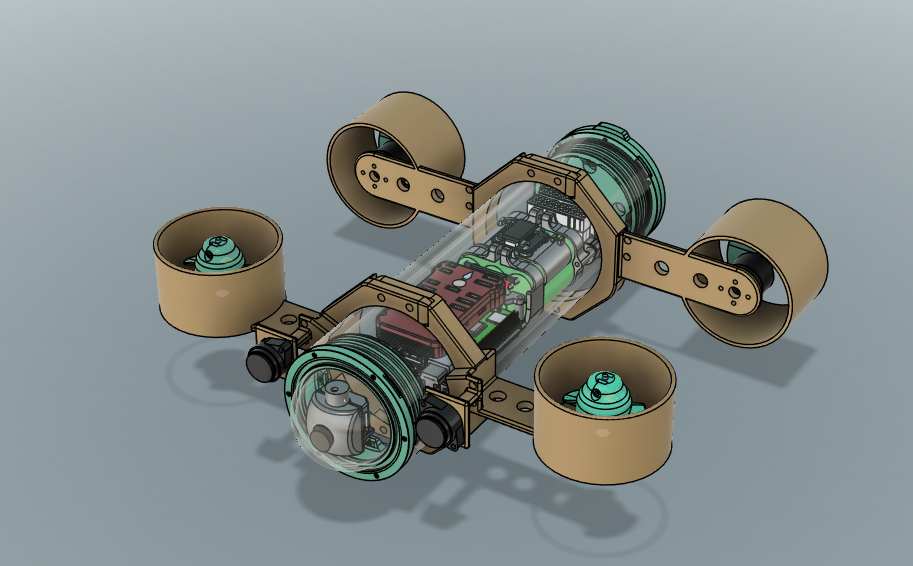
The drone is equipped with 4 motors enabling it to move into the 3-degree of freedom. The 4 motors are hold together into a 3d-printed frame designed in fusion 360. All the electronic part are hold into a electronic pipe which is tightly sealed for water leak. The raspberry Pi handles the feeds from the camera through BlueOS and transmit in real time to the laptop. The arduino coupled with pixhawk and electronic speed controller handles the drone movement.
Results
My team and i, after two years successfully build a prototype which earned us the title of Most Outstanding Performance Award in the Sophomore category.
