


Overview
The project consisted of multiple stages-
- Configure the robot to run ROS and set the remote access points
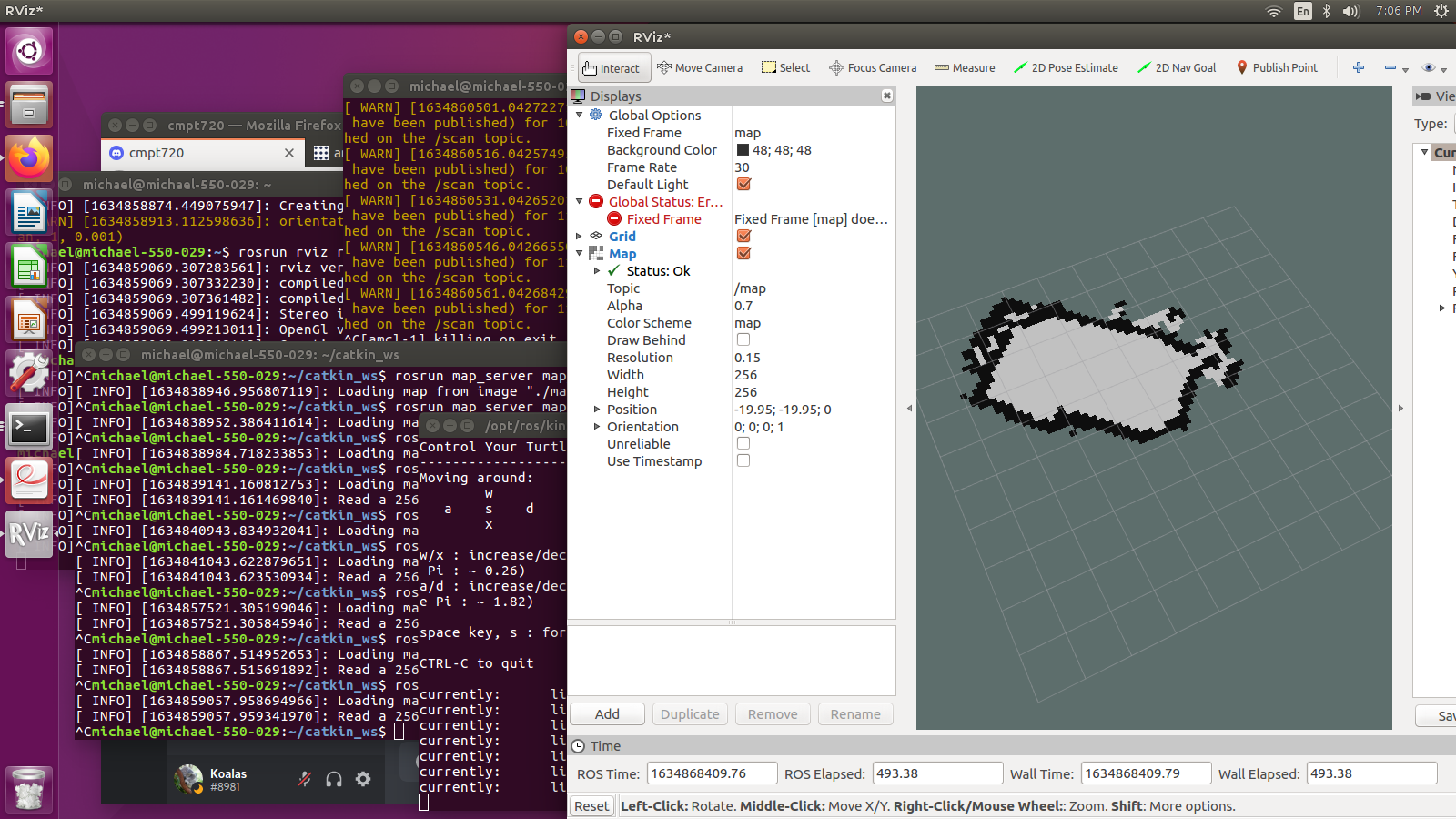
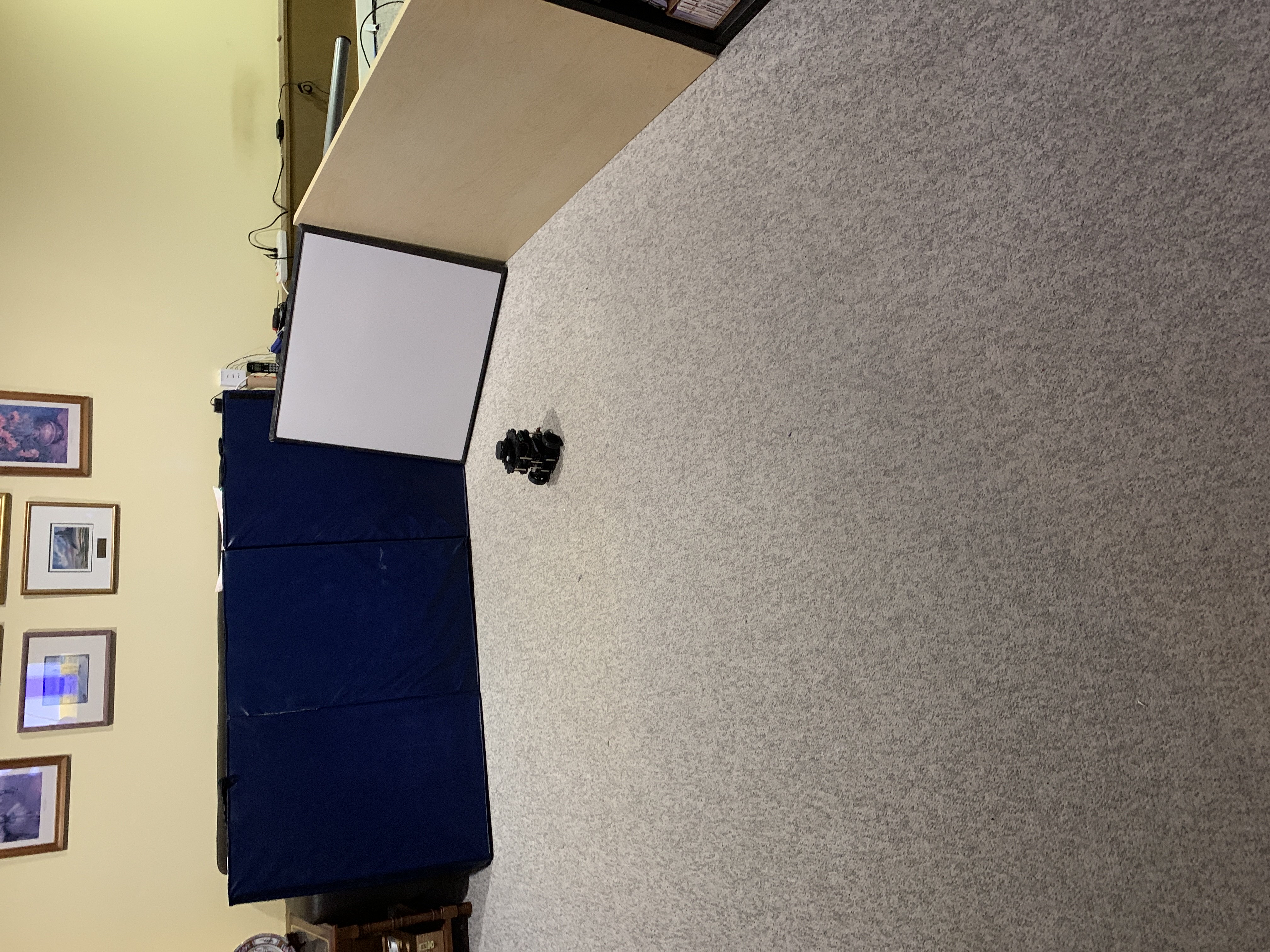
- Use the SLAM GMapping tool to map the general layout of the room using the inputs from the LiDAR sensor
- Move the robot a pre-determined distance (0.5 metres) using Python
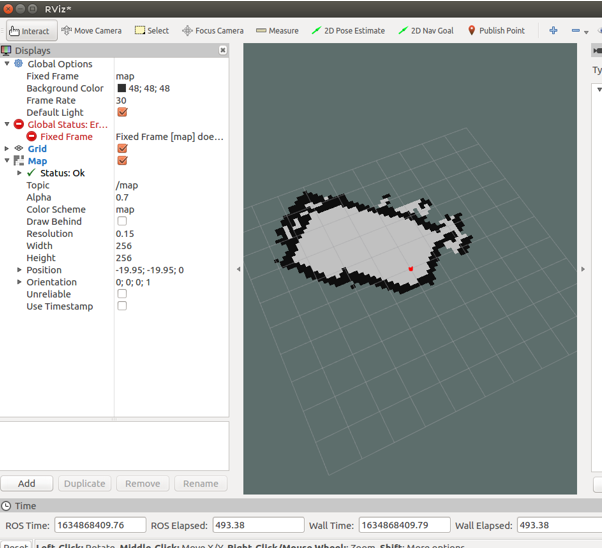
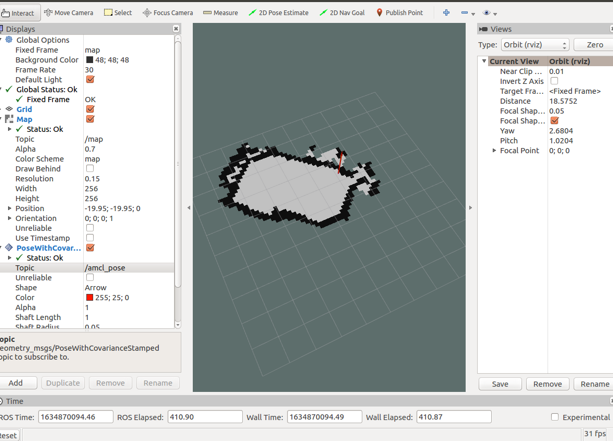
- Select a point in the test environment and write a script for the robot to move there using Python
- Modify the Python script so it can adapt its trajectory to the desired endpoint when an obstruction was placed in its ideal pathway
Screenshots
 |
 |
 |
 |