

Laplace Transfer Functions
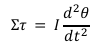
Torque alteration of Newton's Second Law:
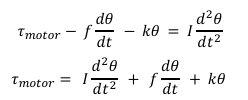
Second order linear differential equation:
Laplace:

Transfer Function:

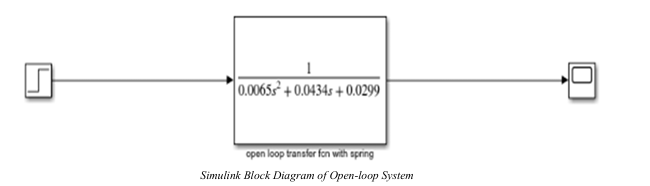
Simulink Diagrams of Open Loop System

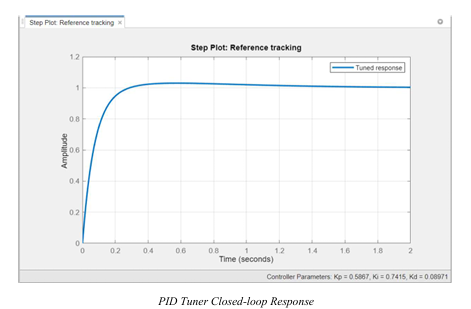
Controller Design (PID)
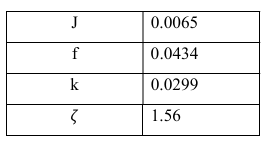
Optimization of an overdamped system:



Jan 2022 - May-2022
Torque alteration of Newton's Second Law:
Second order linear differential equation:
Laplace:
Transfer Function:
Optimization of an overdamped system: