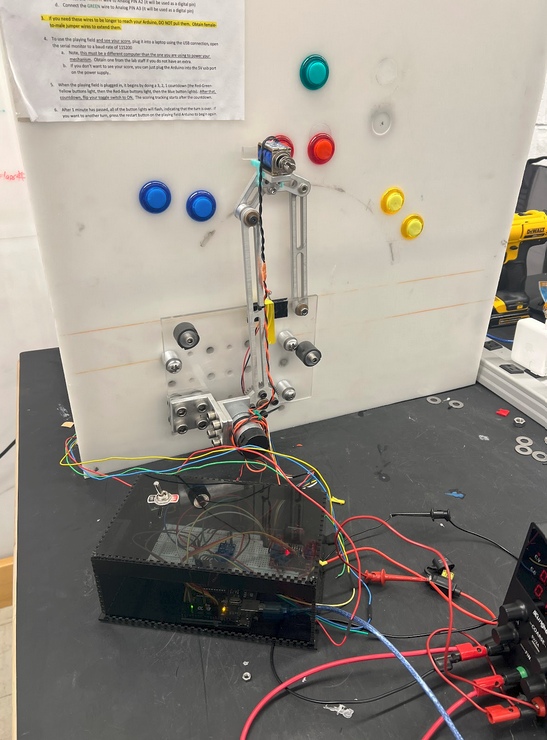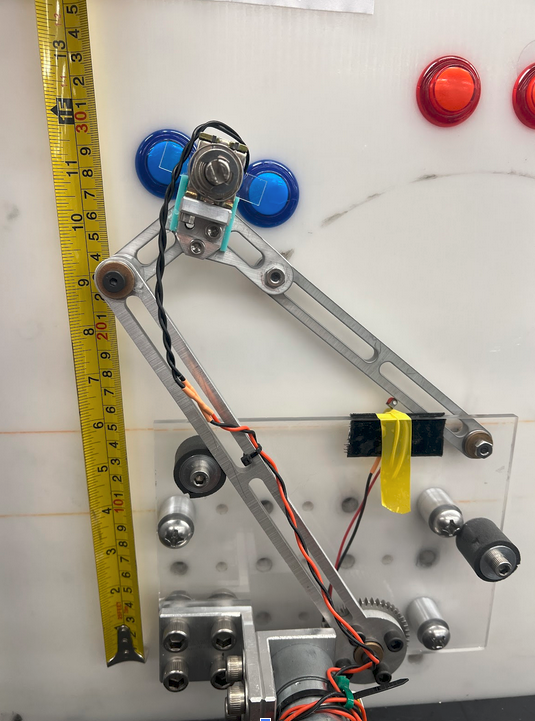
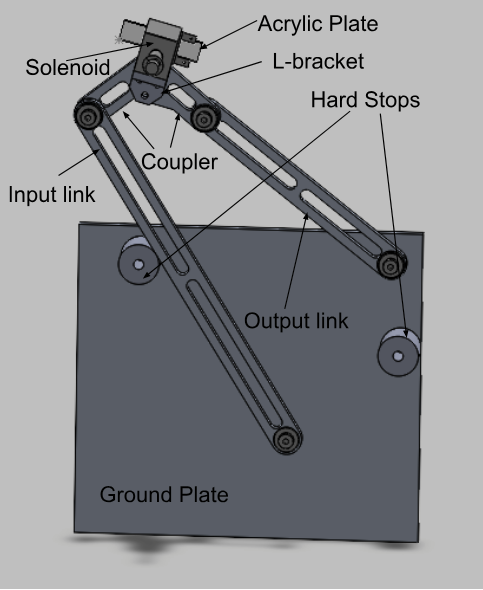
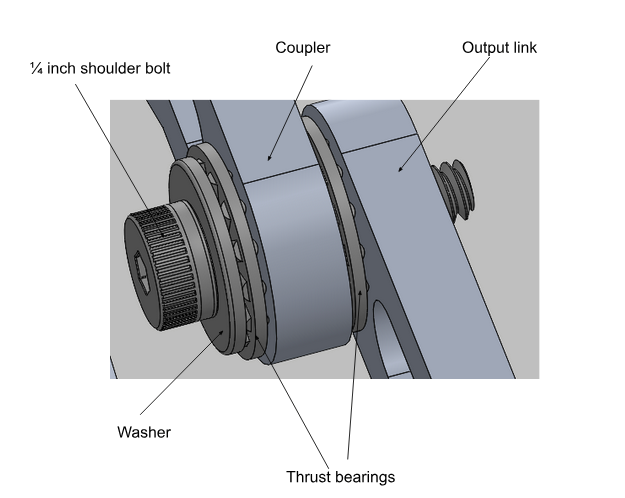
Our groups design featured a linear actuator mounted to water jet links. We used a laser-cut base plate with lathed hard stops and milled angled brackets to mount the motor to the base plate. In order to attach the links together we used sleave bearings, shoulder bolts, and needle thrust bearings to reduce friction.
The linkage was first synthesized on SolidWorks, linkage sizes were changed until we achieved minimal transmission angles and minizmized the amount of power needed to move the links from a motion study within SolidWorks.

From there, we began manufacturing our design and assembled everything.
In order to control our linkage, we utilized PID control loop to control how fast our linkage moved and accelerated to each button position. It took a lot of trial and error in order to fine-tune our system so that it would not overshoot the button positions.