

.png)
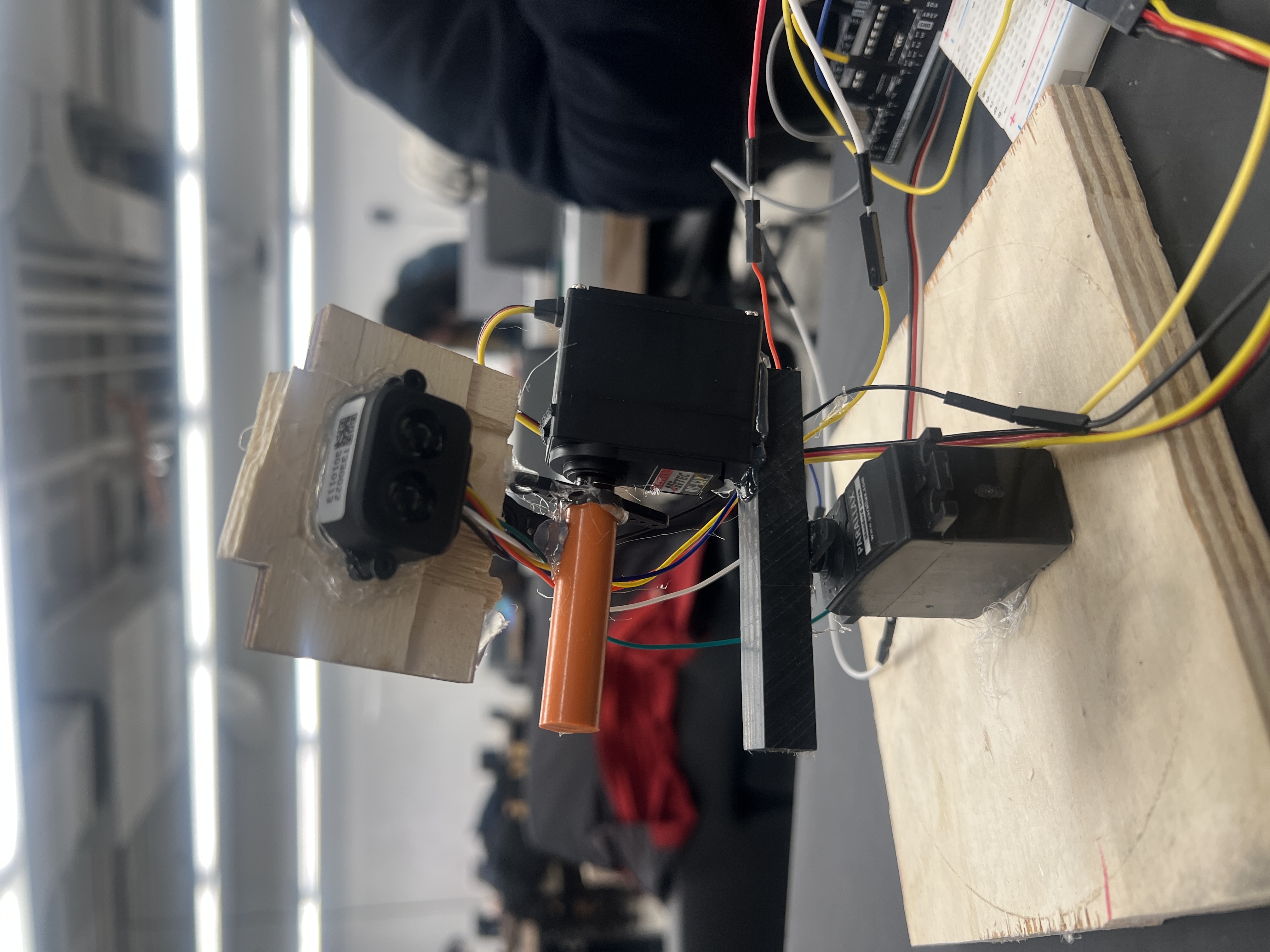
This project utilized spherical coordinates in order to map objects in space. The LiDAR sensor provides the radial distance r, while the servos control the angular parameters θ and ϕ. Each combination of (r, θ, ϕ) corresponds to a single point on the scanned object’s surface.
.png)

By systematically varying θ and ϕ, a dense spherical sampling of the object’s geometry is obtained and stored in a point cloud in matlab. From there I was able to use point cloud meshing in matlab and was able to export an object's mapping as a CAD file. I then started to take repeated measurements to see how accurate I could map different objects,
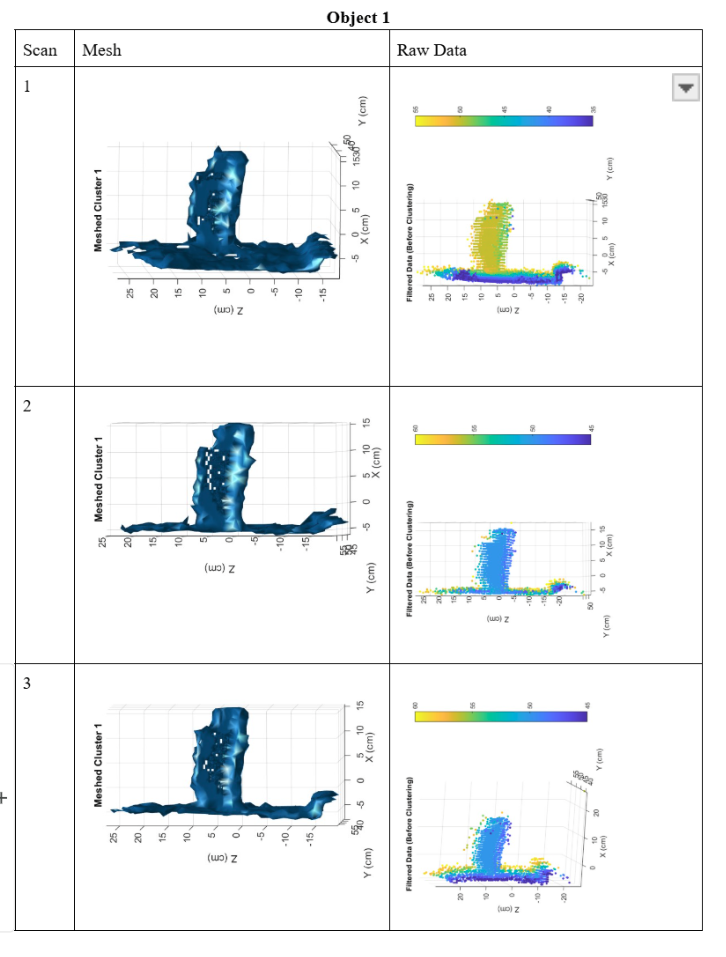
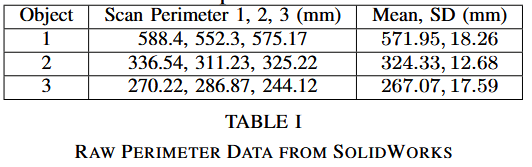
There was quite a bit of variability in each measurement for each object. This was due to environmental factors and material properties such as the reflectivity of each object. I also tried changing the resolution or step size of each servo, however, increasing the resolution drastically increased the scan time, so I decided to stay around 5 degrees for each step.
Overall, this experiment was a successs and I learned a lot about data acquisition and lidar capabilities. If I had more time, I would learn more about point cloud mapping.
This experiement ended up being used for a project in my engineering lab class. Here is the paper