Having joined this project while in its development, I have been helping to refine the existing models capabilities.
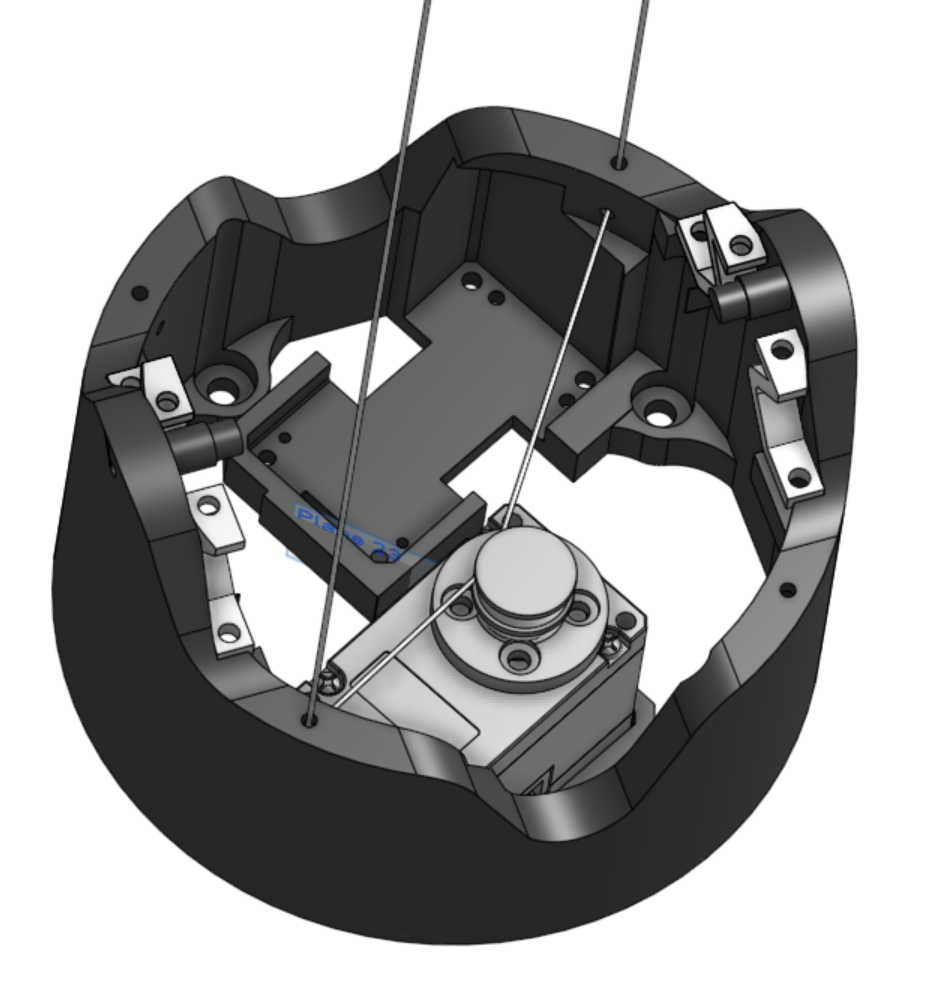
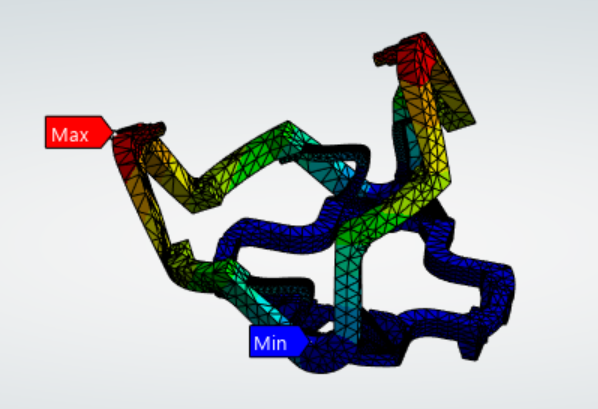
Having a strong background in CAD and FEA, I started with repositioning the motor mounts from the center of the robot to the outer edges and developing and running simulations to gauge the influence of thickness and angle of the robot's flexible joints on its reaction torque. These steps were done to open the possibility for tunable stiffness of the robot, and to target a weakness of the previous design -- sagging due to gravity leading to differences between simulation and experimental results.
During the process of understanding stiffness parameter outputs, I developed a curiosity on how creating stiffness gradients, stiffness biases, and further, what capabilities would be brough to the robot by imitating the stiffness distributions in animal bone structures.
Although I have set up the simulation through the guidance of Yilin Cai, I haven't tested these theories yet, but plan to do so when all Stiffness characteristic simulations are complete. (Sep -13, 2025)
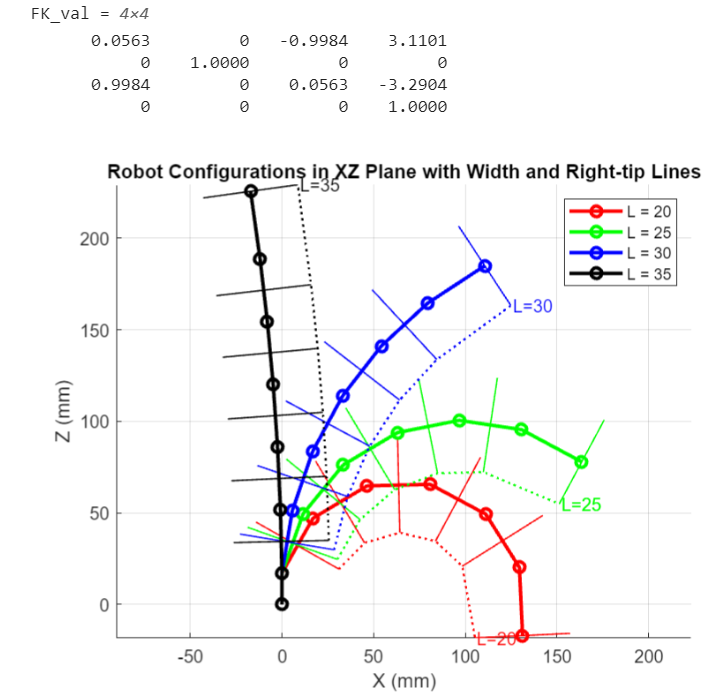
After reading through textbook passages assigned by Yilin, I developed a forward kinematics model of the robot in planar motion where the bend angle would be controlled by change in Tendon Length. I'll be developing 3D kinematics next and validate with Mujoco simulations before applying spring stiffness and motor torques to create a force/moment balance to calculate grip force. (Oct -7, 2025)