This is a self led project where I got to experience creating a robot from scratch and on a budget, the goal of the robot was for it to be used in lawns to remove weeds from the root by tangling them in the same way someone eats spaghetti with a fork. This design differs from commercially available units as they only cut off the top of the plant. I got to learn how to train and implement image recognition software with pytorch through Yolo v11 nano. I also got to design gear mechanisms (worm and planetary) made with the intention of breaking through dry soil given the radius of rotation of the tangling mechanism and the contact area of the nails used.
HighlightS
Redesigned various existing weed removal tools to test viability as an end effector.
Created a 2 DOF robotic arm to hold and use printed tools that require levered forces.
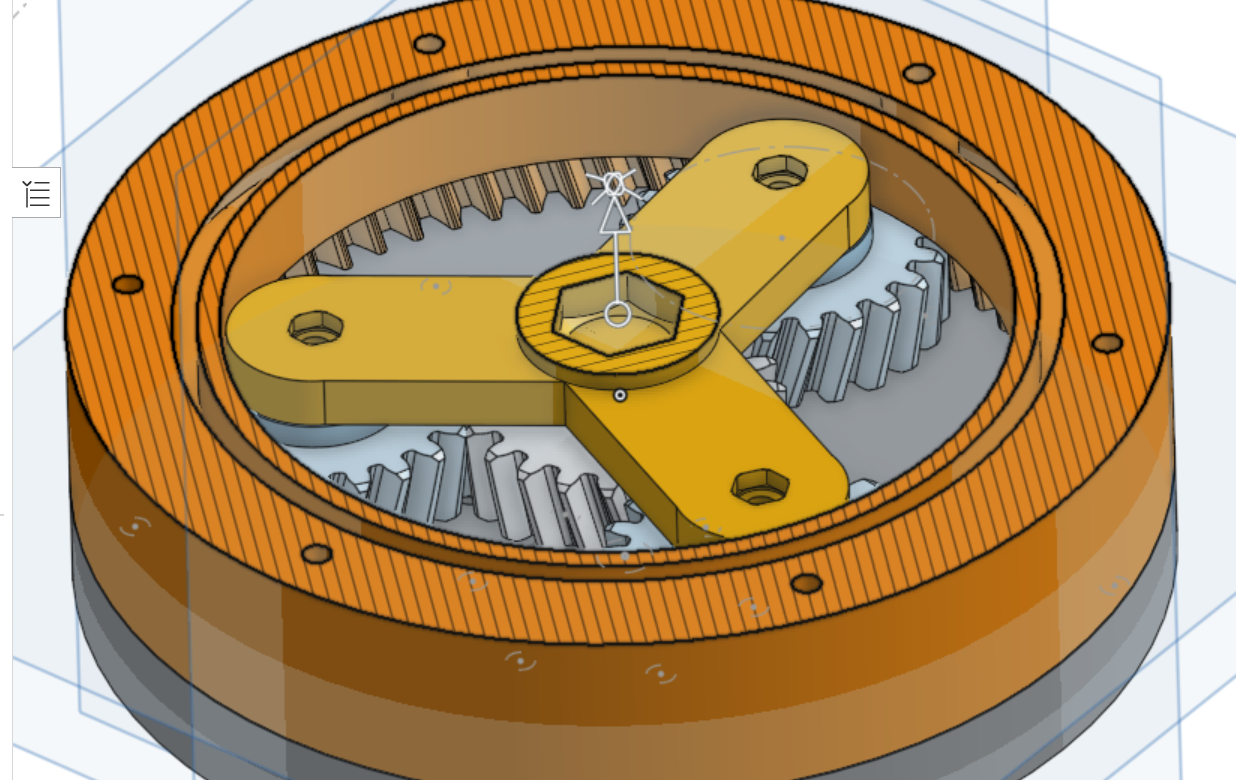
Designed 1:4 planetary gear box and 1:20 worm drive from scratch to output sufficient force to break into soil.
Developed RPi to Arduino commands for recognition and relocation.
SKILLS
- Arduino- RPi-Gear Design- Motor Control- 3D printing/ Rapid Prototyping- CAD (Solidworks and Onshape)



.jpg)
