


Jun 2024 - Current
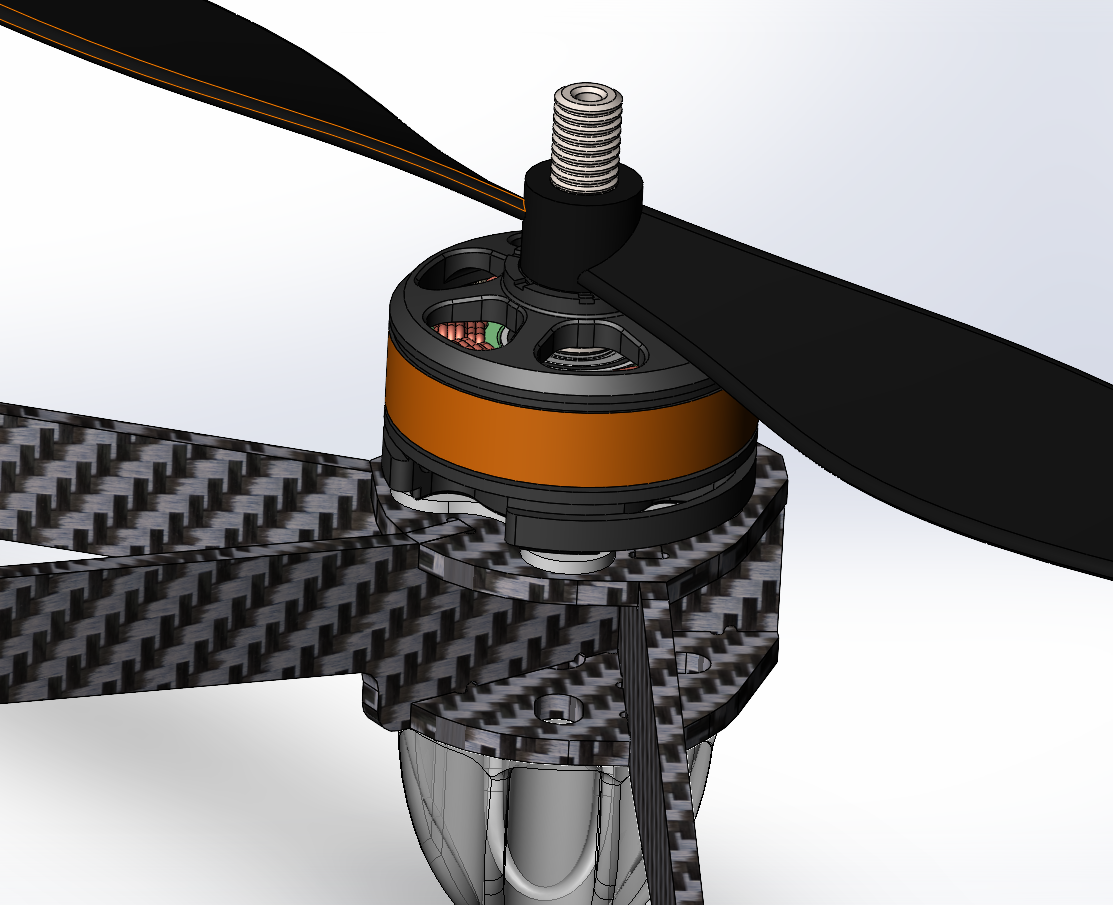
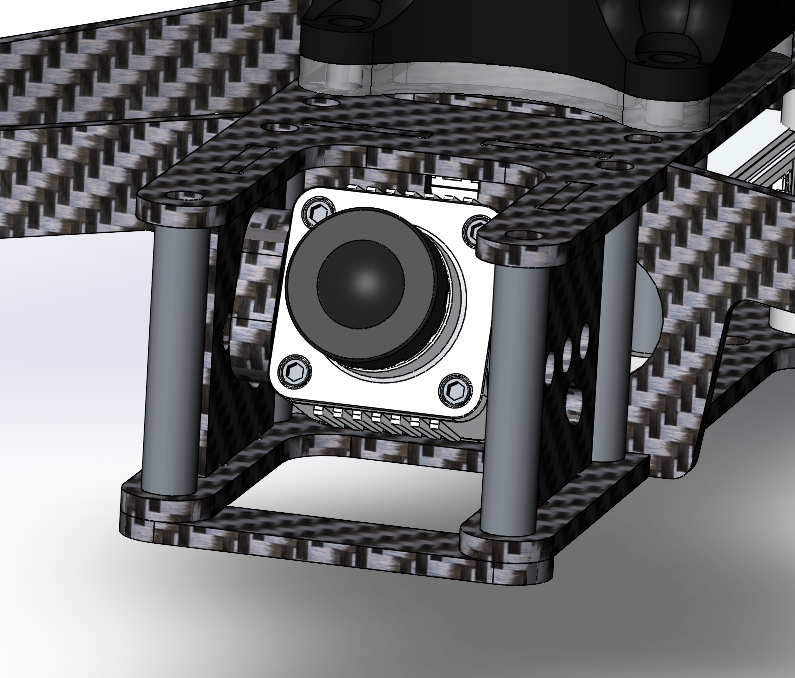
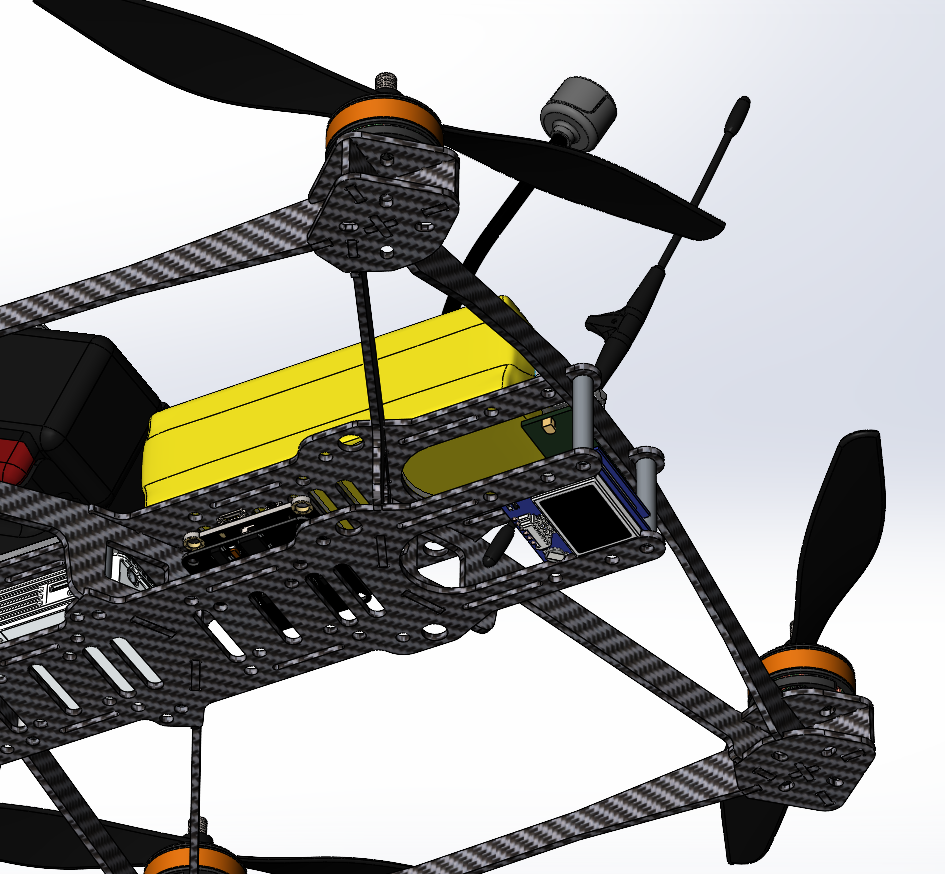
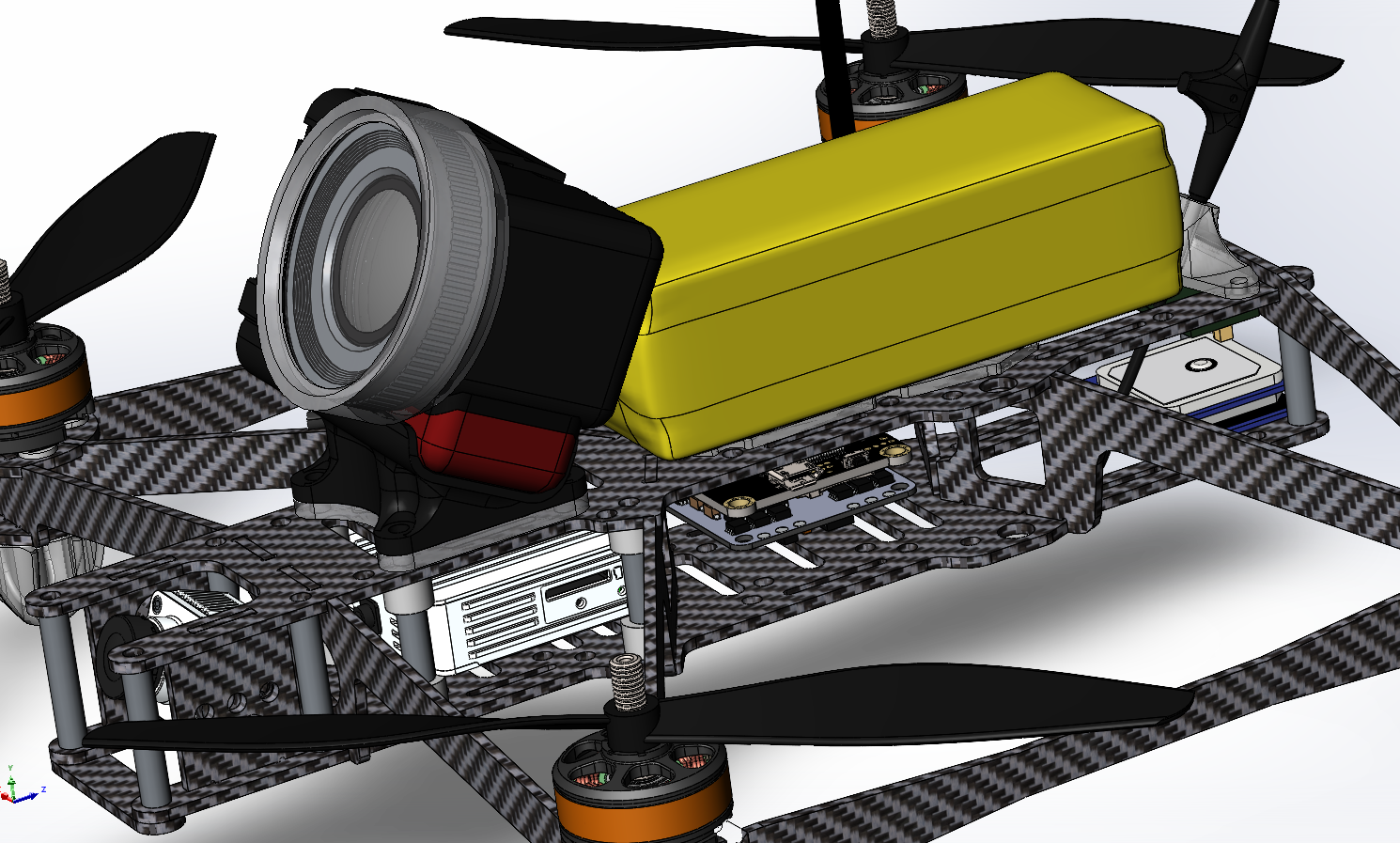
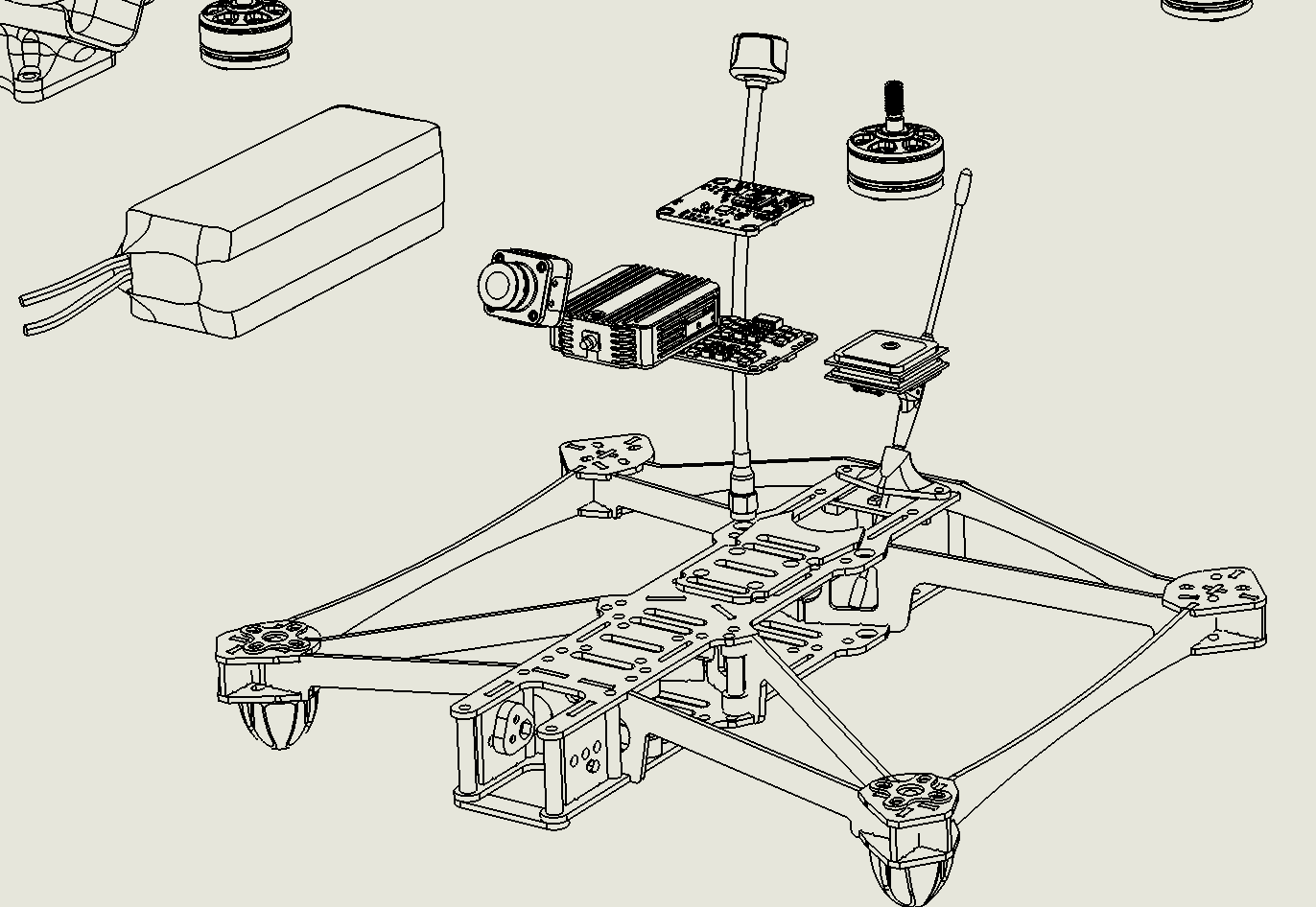
• Designed and assembled a custom FPV drone from carbon frame to flight controller, integrating BLDC motors, ESCs, and LiPo power systems into a cohesive, high-performance platform while reducing total system weight by 39% through iterative structural redesign.
• Programmed and tuned flight-stabilization algorithms in Python, optimizing PID control loops to reduce vibration amplitude, enhance throttle response, and minimize signal latency.
• Modeled and optimized component placement in SolidWorks, refining center-of-mass alignment and aerodynamic symmetry to improve maneuverability and reduce drag.
• Conducted post-flight telemetry analysis to validate system reliability, identify oscillation patterns, and guide firmware and mechanical design iterations.
• Achieved a stable, responsive flight profile with improved vibration characteristics and tighter control authority, enhancing both maneuverability and FPV video quality.
• Reduced tuning cycles and mechanical rework through data-driven refinement of PID parameters, motor harmonics, and structural rigidity.