



Feb 2025 - Current
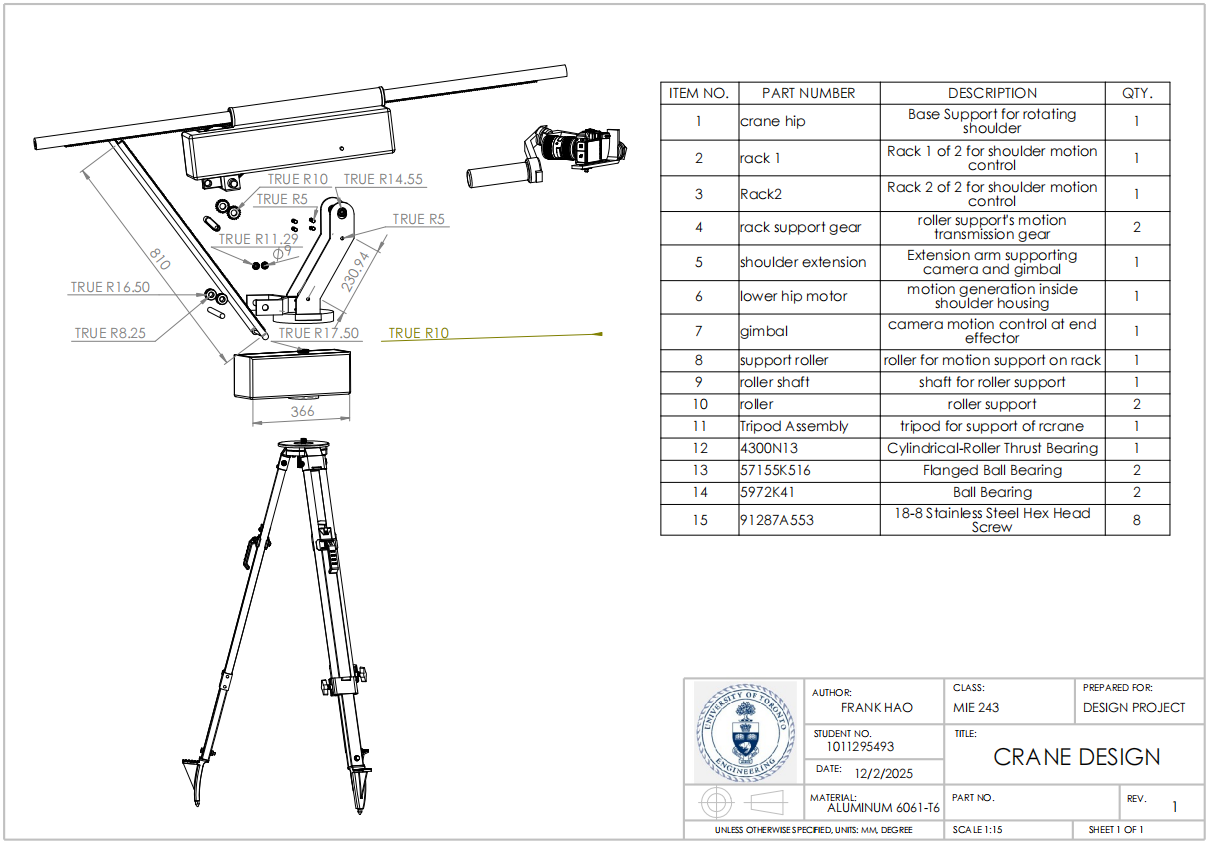
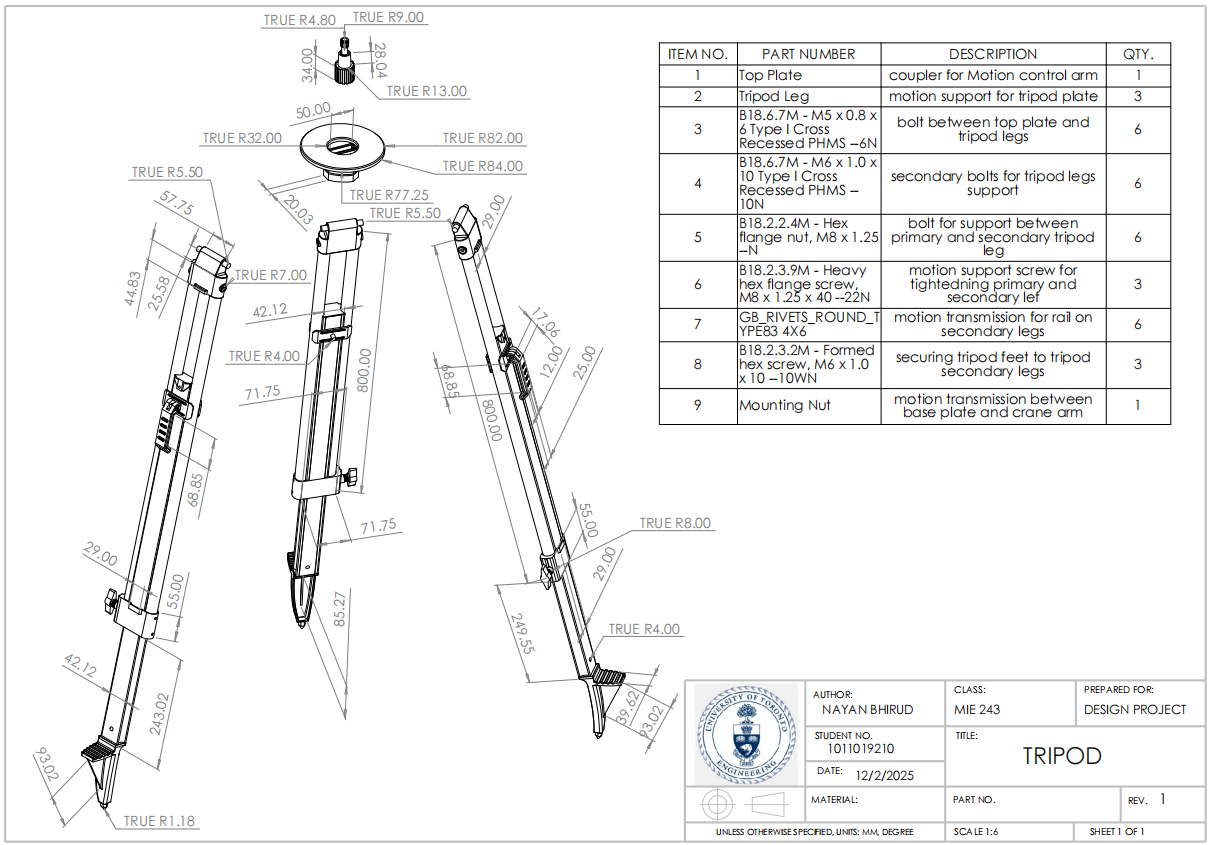
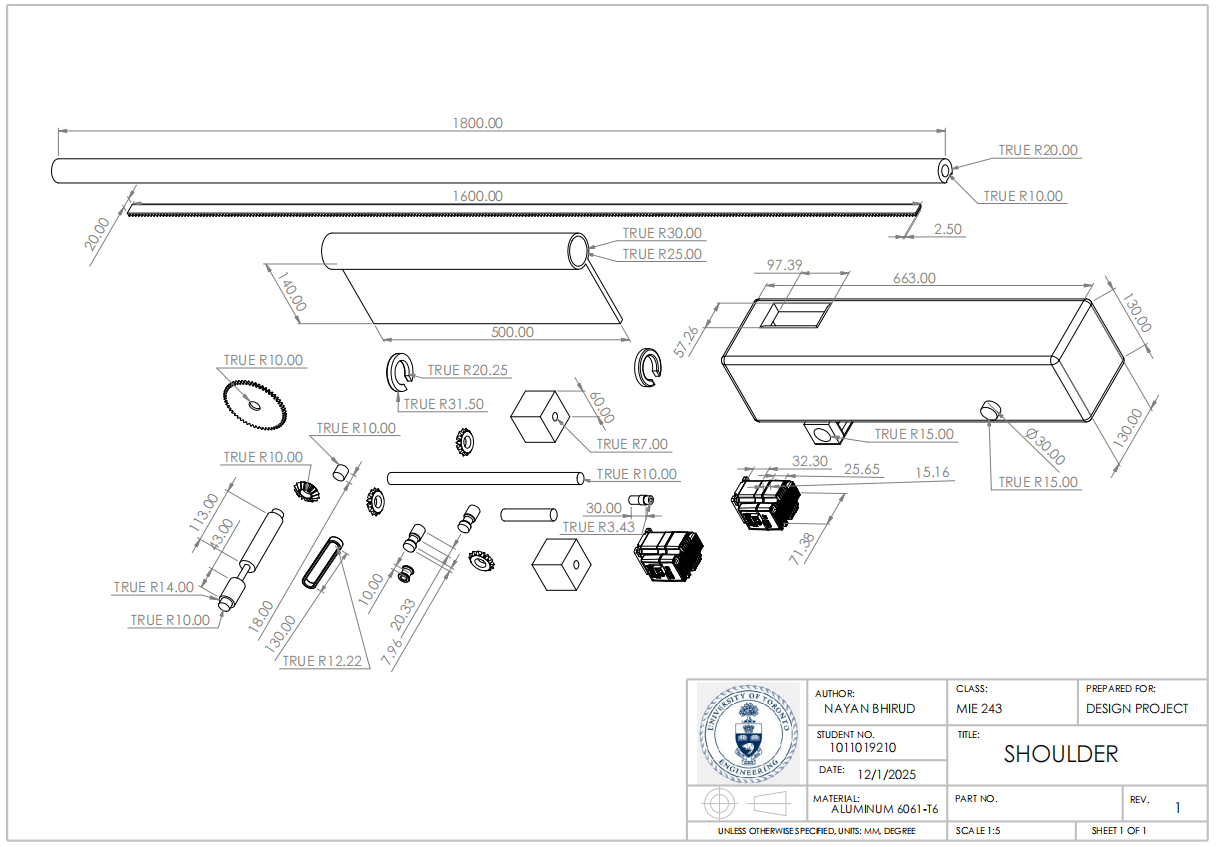
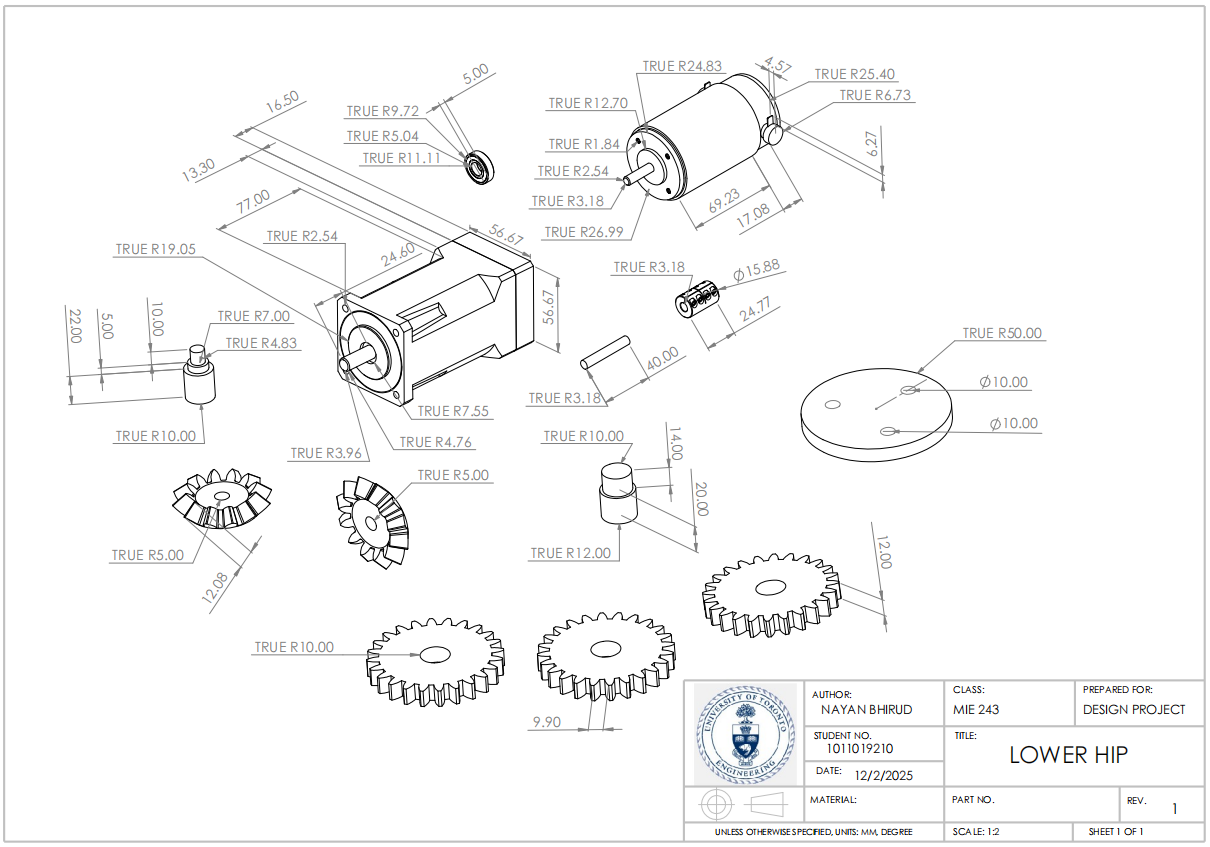
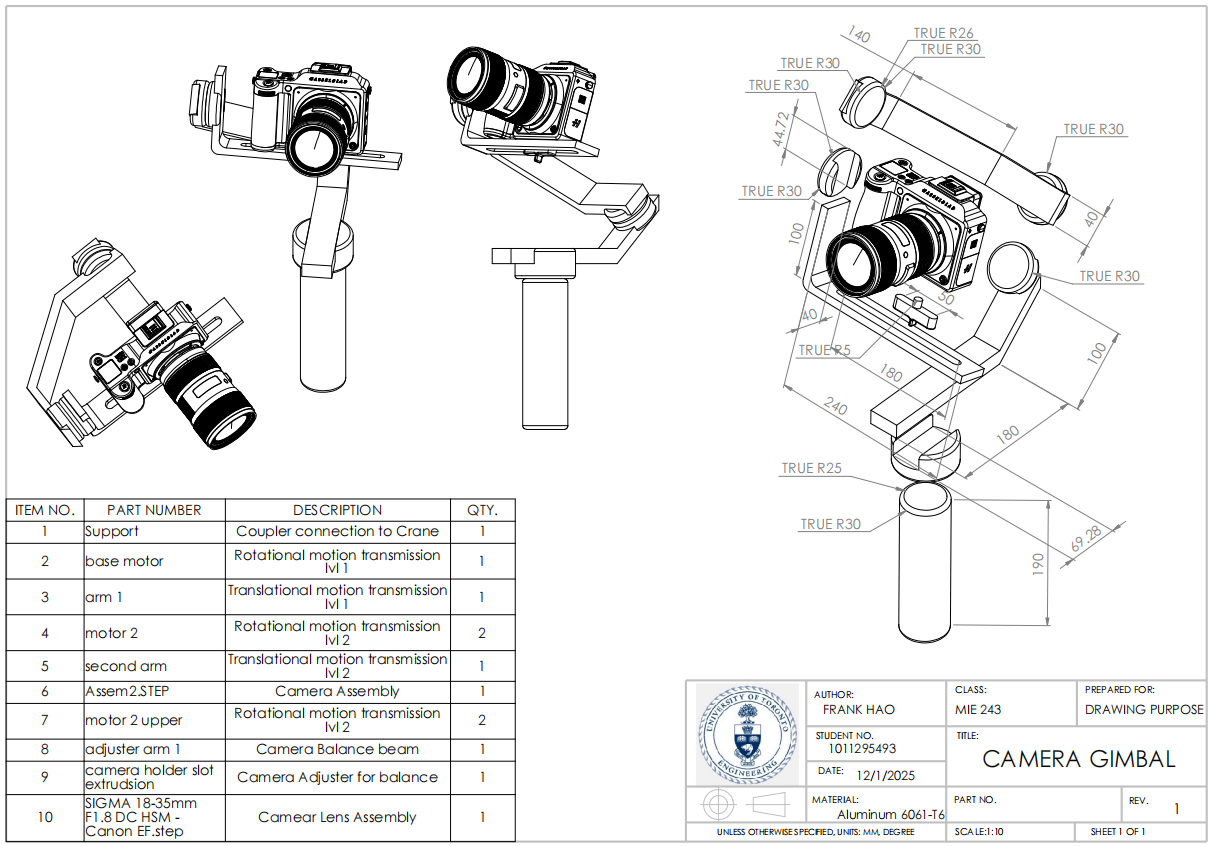
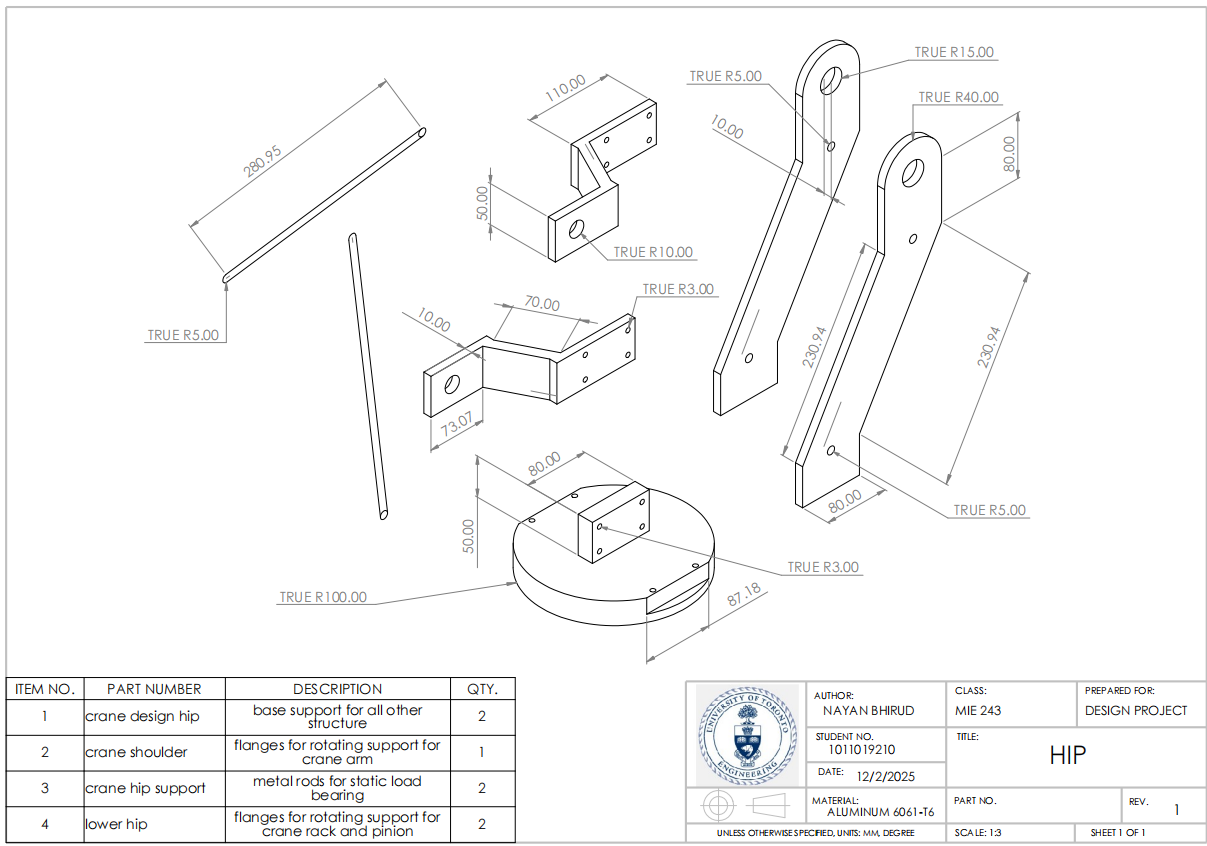
• Designed a 6-degree-of-freedom camera motion-control robot in SolidWorks, creating a fully-mated mechanical assembly capable of precise positioning and unrestricted orientation within its workspace.
• Produced complete manufacturing-ready drawings integrating tolerances, fastening schemes, and kinematic constraints to ensure structural accuracy and assembly feasibility.
• Conducted structural, dynamic, and load-path simulations to validate linkage stiffness, minimize vibration, and ensure actuator torque adequacy across the full range of motion.
• Performed cost analysis, material selection, and design-for-manufacturability optimization, refining geometry to balance performance, weight, and production cost.
• Worked with machining technicians and suppliers to validate feasibility, translating engineering drawings and tolerances into clear production requirements.
• Prepared design documentation summarizing kinematic architecture, material justification, and simulation data for peer and mentor review.
• Achieved a stable, repeatable 6-DoF motion system with improved rigidity and reduced vibration transmission, enhancing camera stability during high-speed movements.
• Validated fabrication readiness, reducing expected design-revision cycles through early interference detection and manufacturability planning.