Long-Range Survey UAV
Autonomous Fixed-Wing Aerial Systems Project
Project Objective
Design and build a long-range fixed-wing UAV capable of autonomous survey missions with reliable real-time situational awareness at multi-kilometer standoff. The system prioritizes endurance, stability, and robust communications for repeatable field operations.
Platform Overview
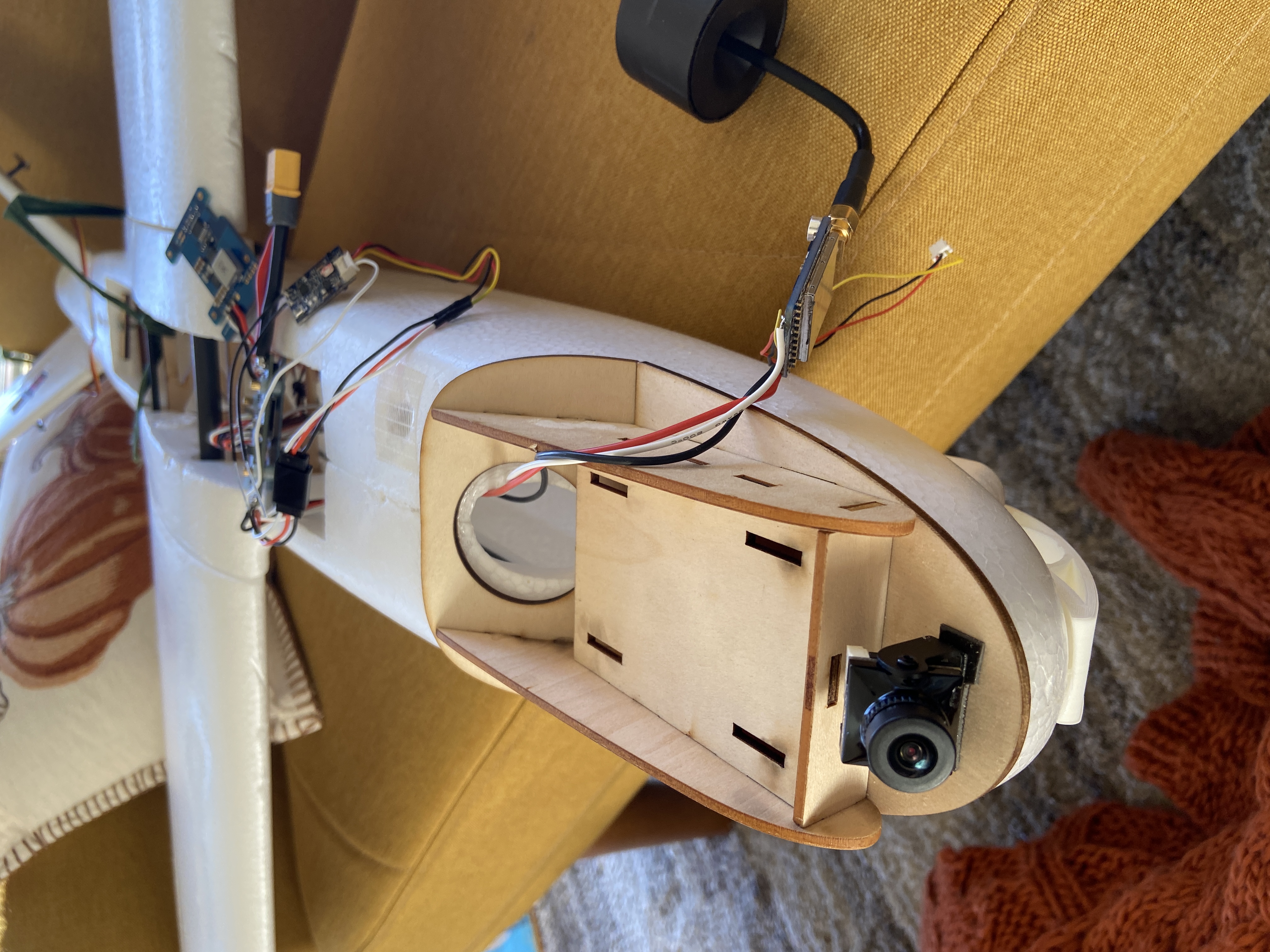
Airframe: xUAV Mini Talon
Battery: 4S 12,000 mAh LiPo
Navigation: GPS-enabled autonomous flight
Video Link: 1.2 GHz (1G3) analog downlink
Ground Station: Battery-powered, portable receive station
Airframe and Power Architecture
The xUAV Mini Talon was selected for its efficient cruise performance, internal avionics volume, and inherently stable flight characteristics. This stability improves video quality during survey legs and reduces pilot workload during autonomous operation.
A high-capacity 4S 12,000 mAh LiPo battery was chosen to align endurance and mission radius with the long-range communications capability. Battery and avionics placement were optimized to maintain a stable center of gravity and predictable pitch response, supporting efficient cruise and reliable autopilot tuning.
Autonomy and Navigation
The aircraft integrates an open-source autopilot stack with GPS to enable:
Autonomous mission planning and waypoint navigation
Return-to-home and recovery behaviors
Repeatable survey routes with minimal manual intervention
Extensive flight testing was conducted to validate autonomous behaviors, navigation accuracy, and failsafe performance under real-world conditions.
Long-Range Video Transmission (1.2 GHz)
Aircraft VTX: Matek 1G3
Aircraft Antenna: Omnidirectional
Ground Receiver: RMRC analog video receiver
Ground Antenna: XAIR 1.3 GHz directional
Topology: Single antenna, single receiver (no diversity)
The 1.2 GHz video system was selected to prioritize propagation and link robustness over higher-frequency FPV bands. An omnidirectional antenna on the aircraft minimizes sensitivity to attitude and bank angle, while the directional ground antenna concentrates gain toward the aircraft to extend usable range.
Ground Station Design
A portable, battery-powered ground station was built to support extended field operations without reliance on fixed infrastructure. The single-chain receive architecture reduces system complexity, power draw, and setup time while maintaining strong link performance at range.
System Outcome
This architecture tightly couples endurance, autonomy, and communications into a cohesive system:
Efficient, stable cruise from the Mini Talon airframe
Extended mission duration enabled by a 12,000 mAh battery
GPS-based autonomous survey execution
Reliable long-range live video for situational awareness